

-

-

-
-
2024.03.22
生物から学び生物を超えるロボットを創り、宇宙開発やレスキューに貢献する! -
工学部 電子情報システム工学科
詳細はこちら
教授 松野 文俊
-
2024.03.22
-

-
-
2024.03.01
電化製品から出る電磁ノイズってなに? -
工学部 電気電子システム工学科
詳細はこちら
講師 神野 崇馬
-
2024.03.01
-
-
-
2024.01.29
“視える化”が開く技術の扉 -
工学部 機械工学科
詳細はこちら
准教授 伊與田 宗慶
-
2024.01.29
-
-
-
2023.12.21
地域の「公」と「私」のはざまで新しい建築・都市を構想する -
工学部 建築学科
詳細はこちら
教授 吉田 哲
-
2023.12.21
-

-
-
2023.11.24
人と動植物が共存できる川づくりへの挑戦 -
工学部 都市デザイン工学科
詳細はこちら
准教授 小川 芳也
-
2023.11.24
-
-
-
2023.10.02
文学は「じわじわ」役に立つ -
工学部 総合人間学系教室
詳細はこちら
講師 尾田 知子
-
2023.10.02
-
-
-
2023.09.26
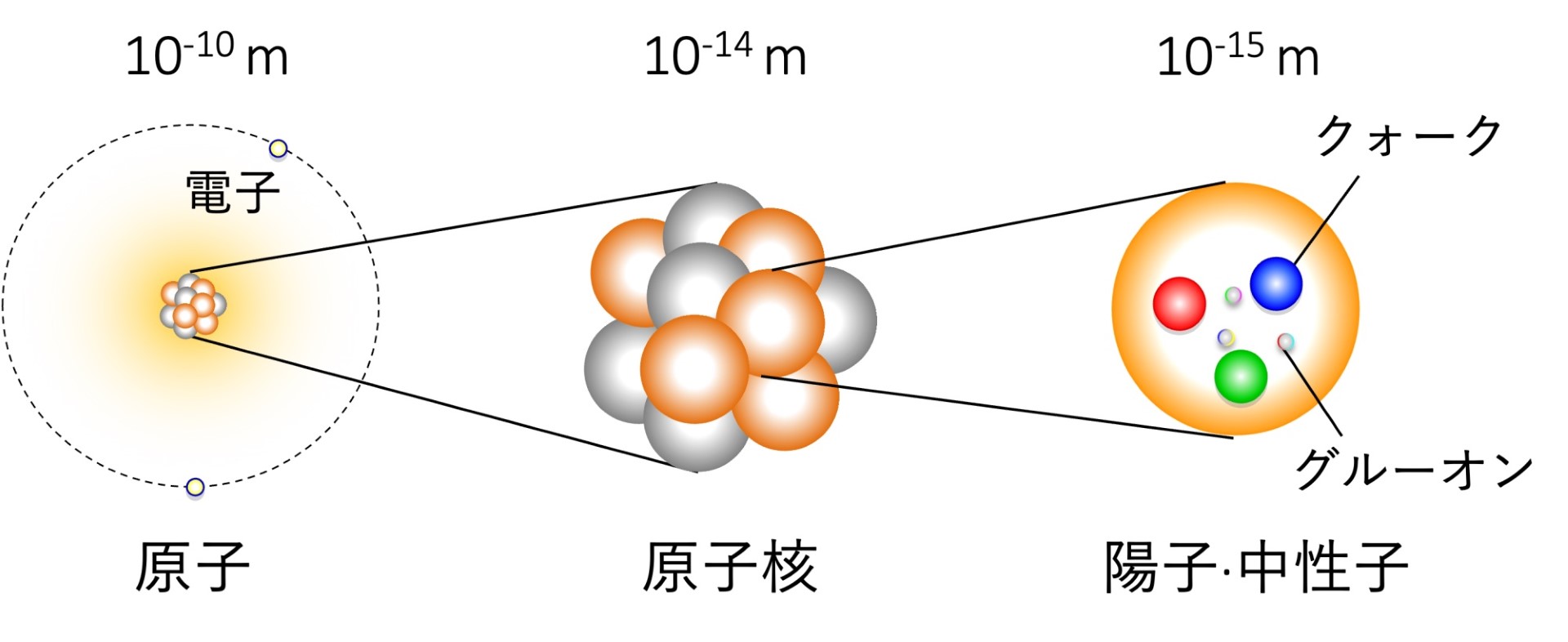
数兆度のクォークスープ -
工学部 一般教育科
詳細はこちら
講師 門内 晶彦
-
2023.09.26
-

- 大学紹介
-
学部・大学院
- 工学部
-
工学部
都市デザイン工学科
建築学科
機械工学科
電気電子システム工学科
電子情報システム工学科
※2019年4月「電子情報通信工学科」
応用化学科 環境工学科 生命工学科
から名称変更 - 大学院工学研究科
-
建築・都市デザイン工学専攻
電気電子・機械工学専攻
化学・環境・生命工学専攻
※2017年度以降の構成
- ロボティクス&デザイン工学部
- ロボティクス&デザイン工学部 ロボット工学科 システムデザイン工学科 空間デザイン学科
- 大学院ロボティクス&デザイン
工学研究科 - ロボティクス&デザイン工学専攻
- 情報科学部
-
情報科学部
データサイエンス学科
(2021年4月開設)
情報知能学科※2019年4月「コンピュータ科学科」
情報システム学科 情報メディア学科 ネットワークデザイン学科
から名称変更※2019年4月「情報ネットワーク学科」
から名称変更 - 大学院情報科学研究科
- 情報科学専攻
- 産官学連携・研究支援
- 学生生活
- 就職・キャリア形成
- 教育・研究施設
- 国際交流
-
 インスタグラム アカウント一覧
インスタグラム アカウント一覧
-


 EN
EN
