生物は走行やジャンプなどダイナミックな運動を難なくこなし,固い道やぬかるみ,山道など様々な環境で適応的にその運動を選択します.また身体という限られた空間内で,驚くほど豊かな知覚が得られる頑健な機構を有しています.一方現在のロボットは,工場で見られるロボットのように緻密で正確な運動は得意ですが,生物のようなダイナミックかつ適応的な運動は苦手です.また高機能のセンサ技術は多々存在しますが,コンパクトで頑健なシステムはあまり提案されていません.
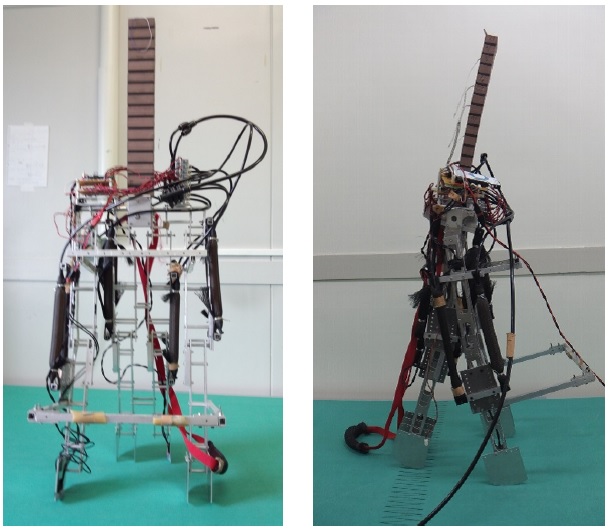
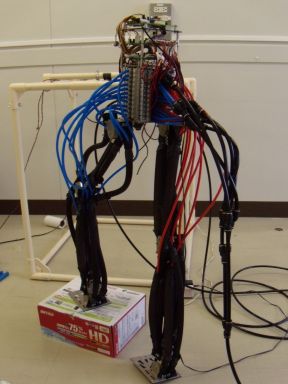
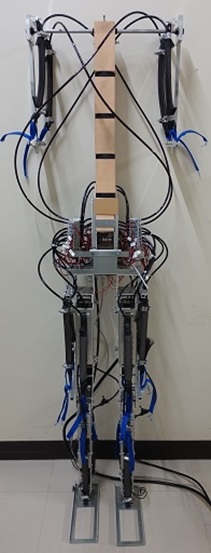
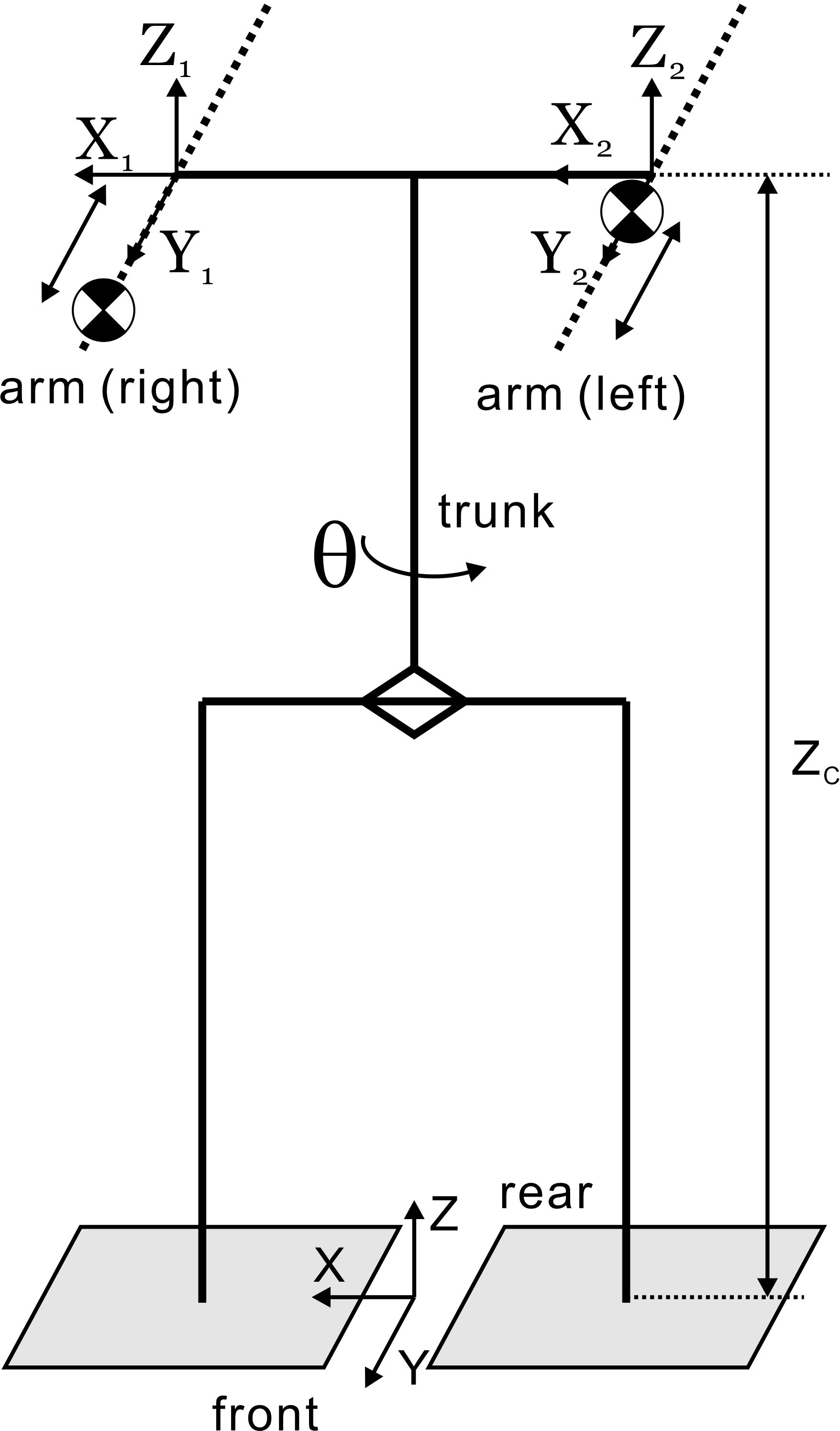
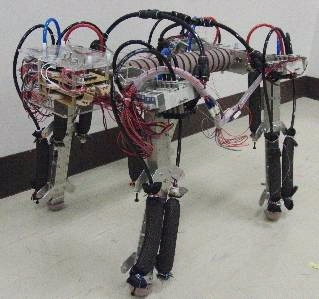
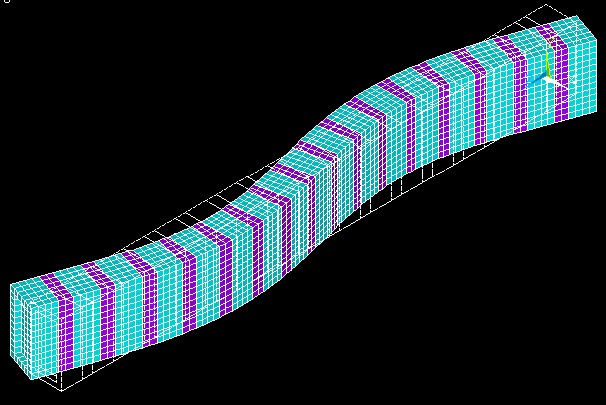
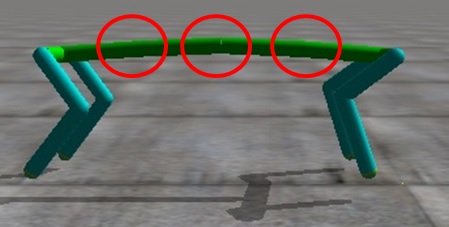
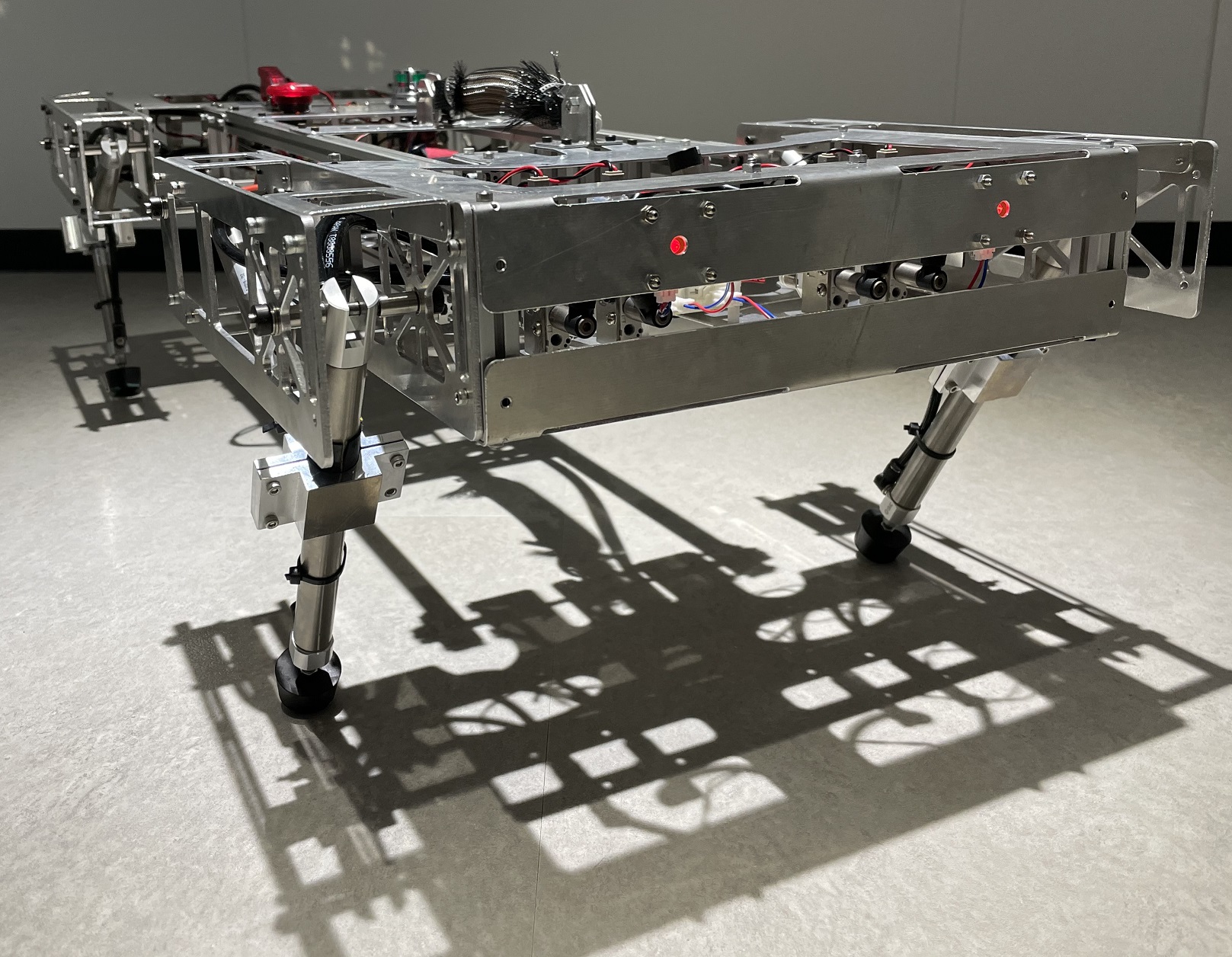
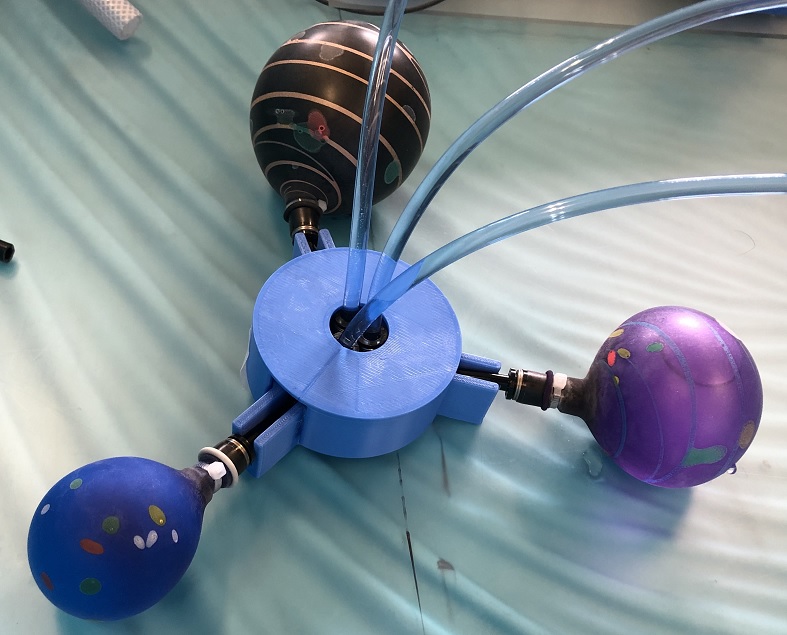
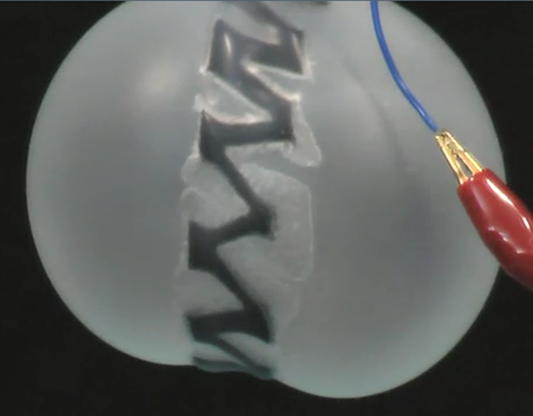
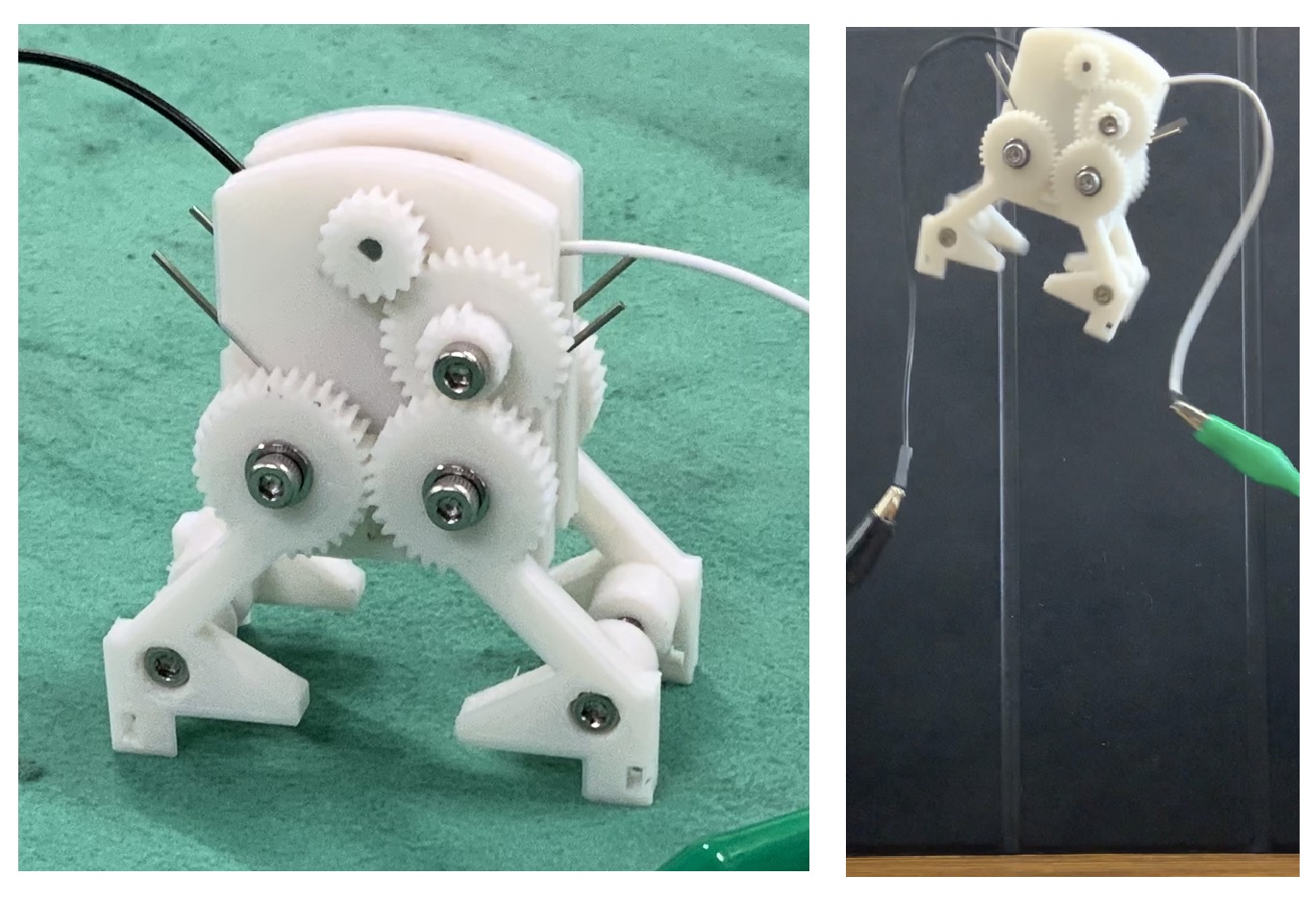
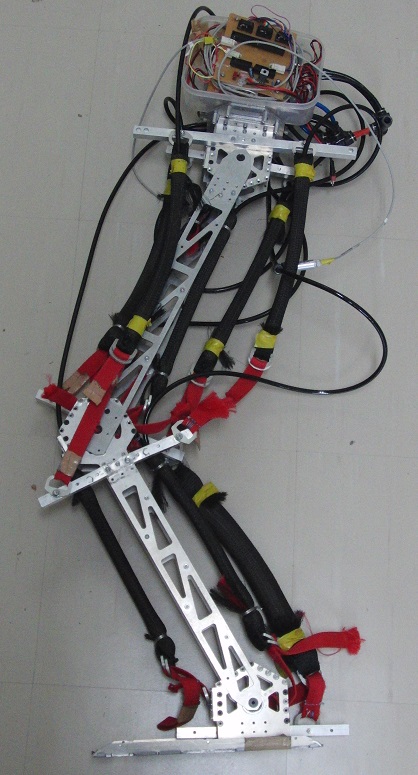
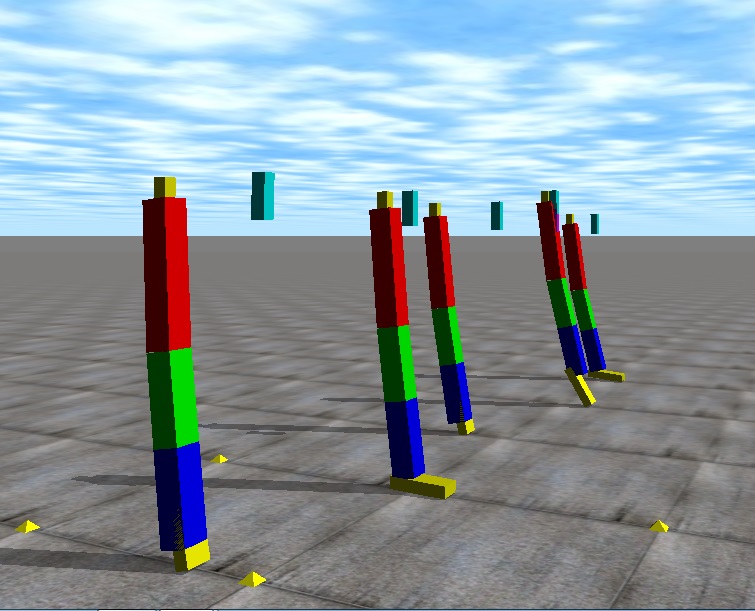
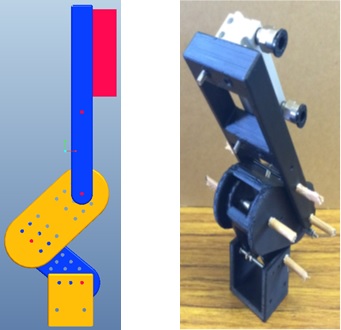
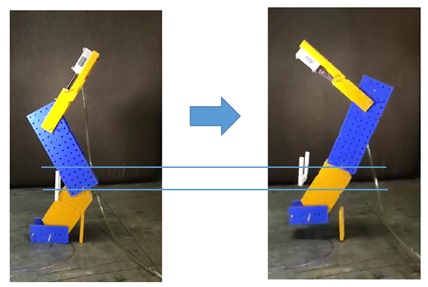
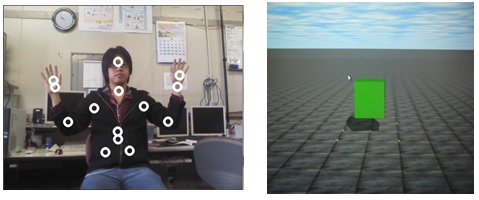
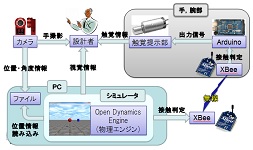
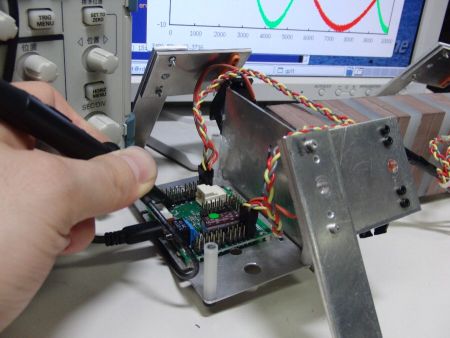
このような問題を解決するために,私たちは電機システムと機械設計のバランスを考慮したロボットの身体設計を提案します.設計にあたり,私たちは生物を模擬した身体設計に着目しています.具体的には,人工筋を配する二脚・四脚ロボット,脊椎構造を有する体幹構造,コンピュータシミュレーションによる身体設計支援インタフェースの構築などを研究しています.
本研究室で扱う学問領域は電気・電子工学だけでなく,機械工学,力学,数学,また生理学や脳神経学など多岐にわたります.本研究室に配属される卒業研究生は,自主ゼミや輪講を通してこれらを一から学んでいきます. 現在の研究グループを紹介します.研究グループは研究の進捗状況,研究のトレンドにあわせて流動的に変わります.