このページでは実機を中心に紹介.研究の進度などの理由で紹介できない実機もあり.
あと実機と同じ数ぐらいシミュレーションもあるが,それは追々ご紹介.
2008年度 2009年度 2010年度 2011年度 2012年度 2013年度 2014年度 2015年度
2016年度 2017年度 2018年度 2019年度 2020年度
■2008
この年に赴任.

|
|
■ 2009
この年にこのHPのフレームワークを学生さんが組んでくれた.ありがとうありがとう.
|
| (開発コード:亀井K子さん,リリース名:Kko) |
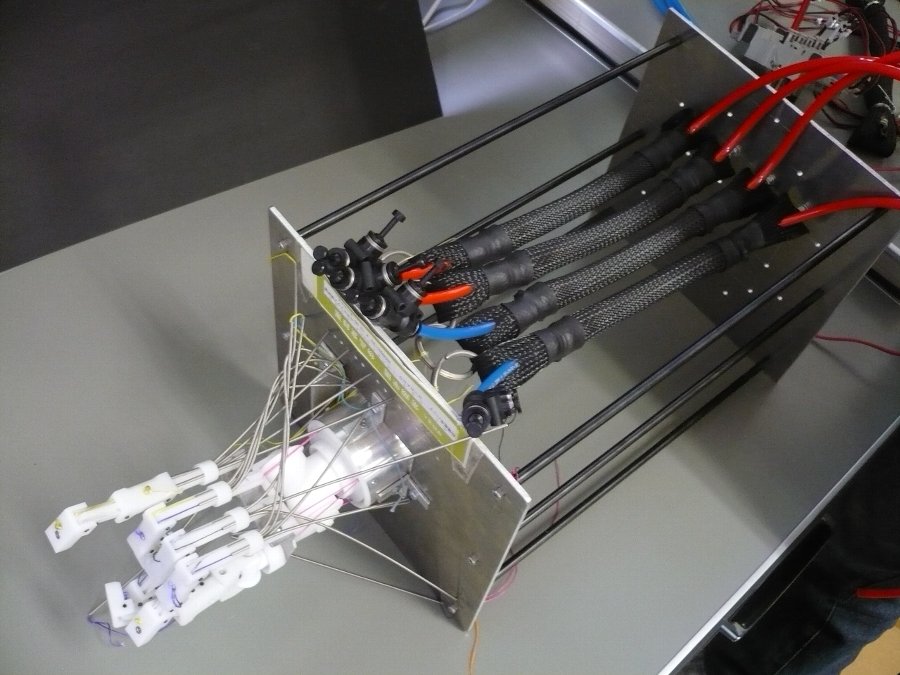
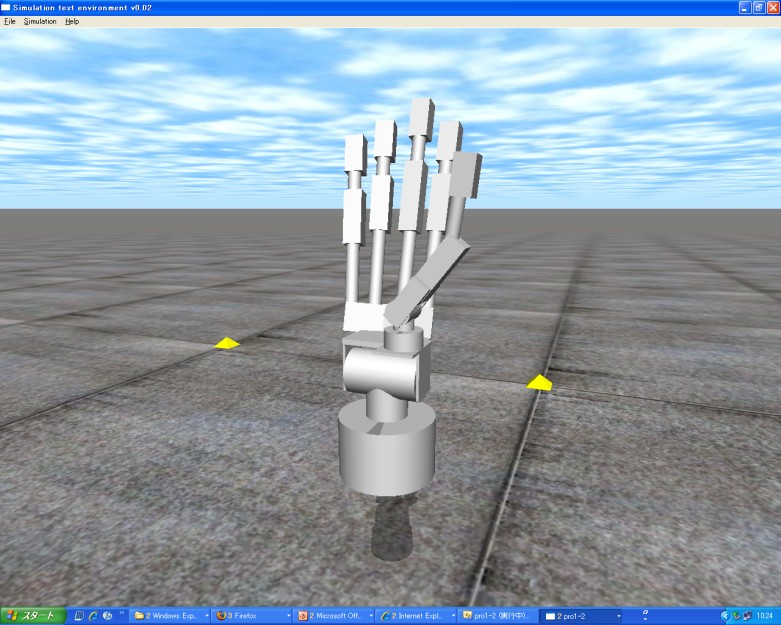
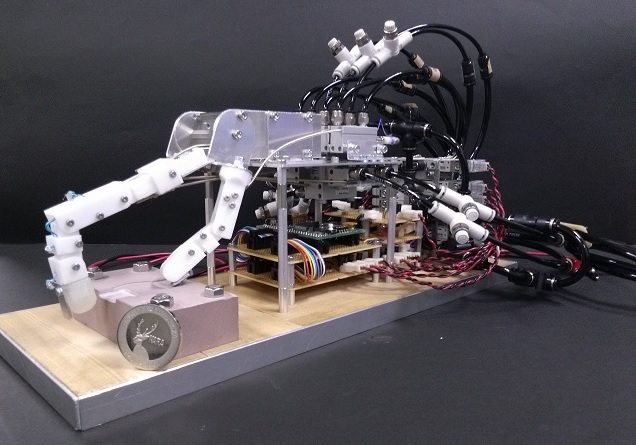
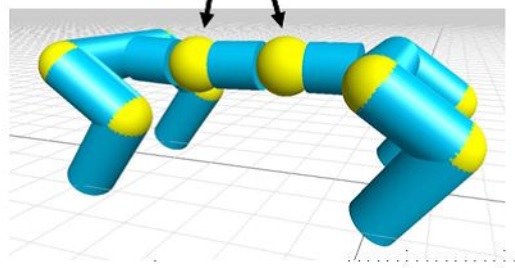
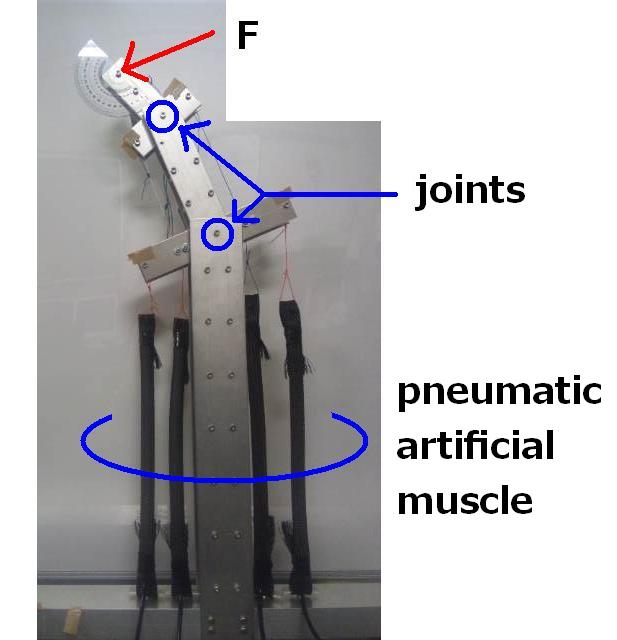
| 昨年作ったロボットハンド・・・現行では実験ができないので,とりあえず指一本だけ動かすことにした.駆動源は昨年と同じ,マッキベン型空気圧人工筋.一つの指に三つの関節があるから,拮抗駆動(一つの筋は一方向にしか関節を曲げられないので,一つの関節を自在に動かすには二つの筋が必要)するので,6つの筋が必要なんだけど・・・あれ,なんで4本なんだろう.この年入ってきた学生さんがしっかり測定をしてくれたおかげで,この研究の方向性が見えてきた. |

| この年は料理を作るのが好き(食べるのは苦手・・・夕飯はブラック○ンダーで良いらしい)な学生が来て,コス○コで大量買いをしては同級生に食べさせるという修行を科していた.パスタの鬼盛りとエンドレス素麺は思い出すだけで胃が酸っぱくなる.そんな彼がある日作ったのが,バケツプリン.文字通りバケツにプリンの素を入れて冷やし固めたもの.どうも記録によると,上記ロボットハンドを担当していた学生の誕生日のため(という理由を付けて)作ったものらしい.このプリンはその後特製容器にあけたのだが,数秒後に自重に耐えきれず崩れ落ちていった.崩れたプリンは研究室のメンバで(苦しみながら)食べました. |
| (開発コード:亀井K子さん2号,リリース名:Kko2) |
■ 2010
この年は特によく飲みよく叫んだ気がする.
|

|
|
| (開発コード:黒点虎,リリース名:Kro) |
■ 2011
この年はM2M1合わせて院生が6名+学部生の大所帯に.
|

|
■ 2012
この年は研究室始まって以来の4名修論.さらに四年生には,NHKロボコン初出場にしてベスト8に導いた伝説のリーダー加入.
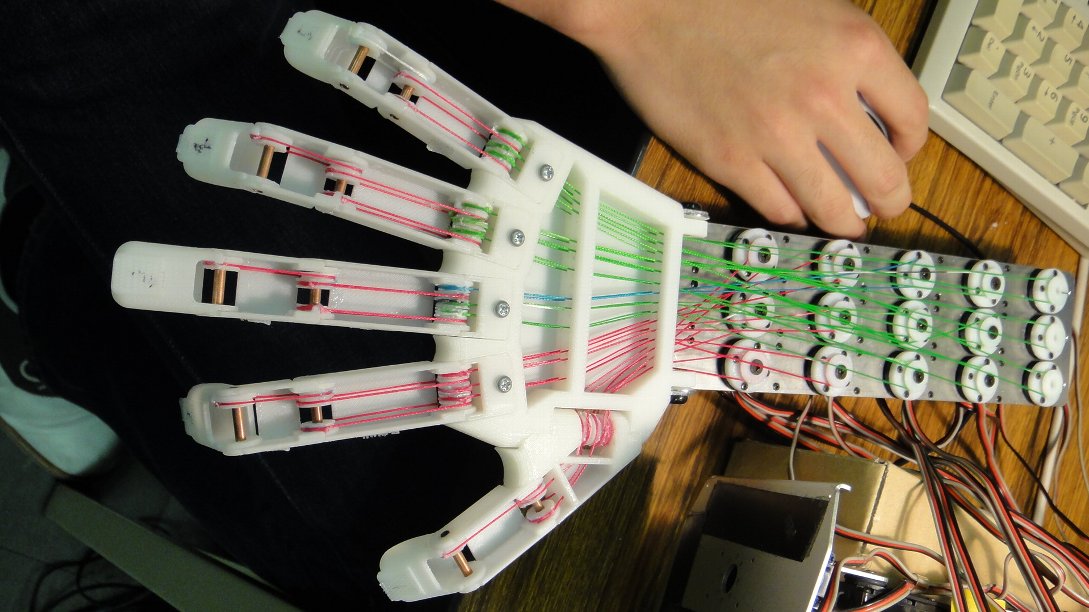
|
| なおこの指は上記のリーダーが3Dプリンタで作成.その他は設計を一から勉強し始めた卒研生が全部作り上げた. |
|
|
■ 2013年
出世した.この年新たに作られたロボットは,残念ながら1台.Arduinoいいよね〜,ということで,触りだした年だったような気が.
|
■ 2014
この年4月から半年間スイスへ.学生とのミーティングはskypeで行った.時代だなぁ.
スイスの研究室で触っていた3Dプリンタの便利さに驚く(今更).帰国後早速3Dプリンタ導入.「慣らし運転」と称して様々な謎物体ができあがる.

|

|
■ 2015
この年あたりから,学外の講演会の依頼や企業の方と何かしたりということが出てきた気がする.
なおこの年から,改装した研究室で活動する
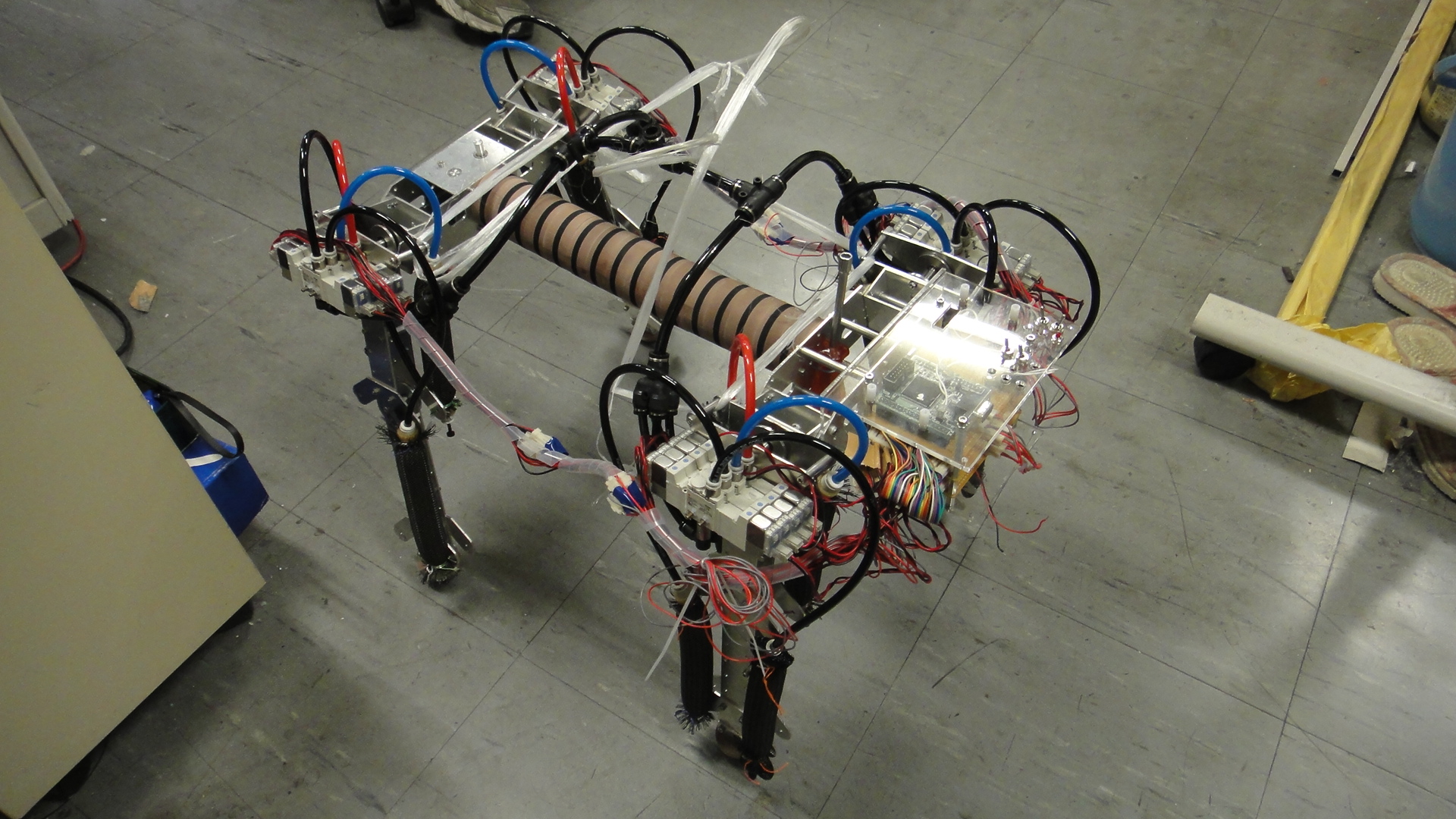
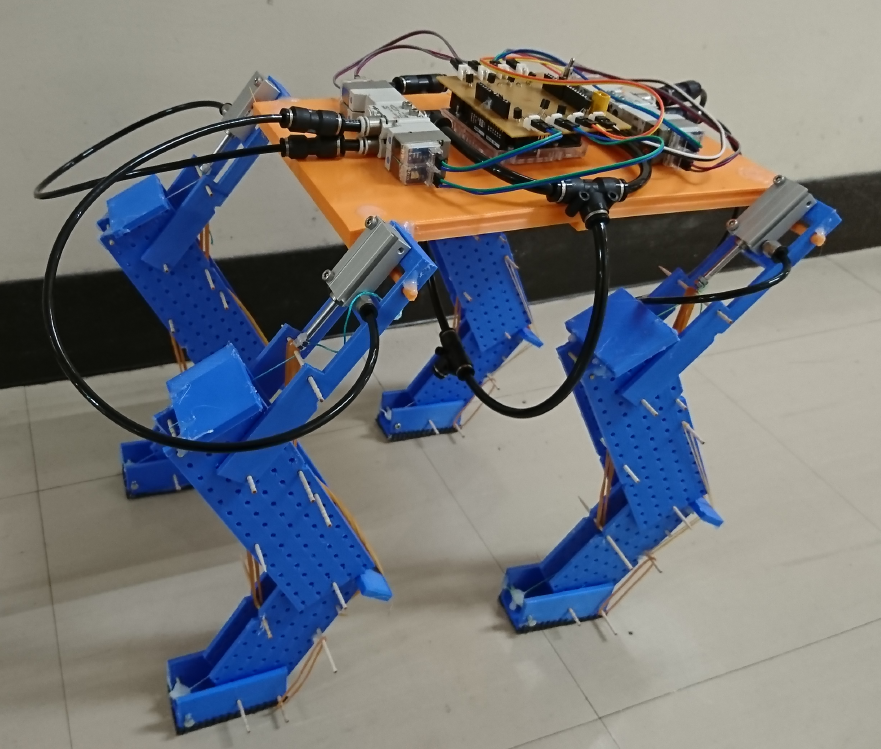
|
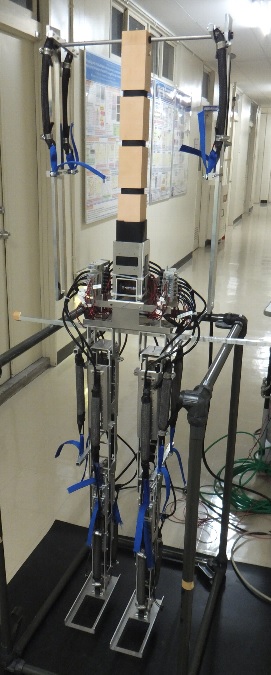
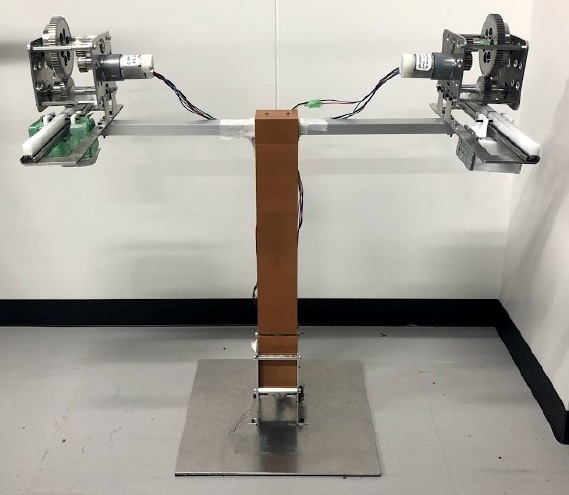
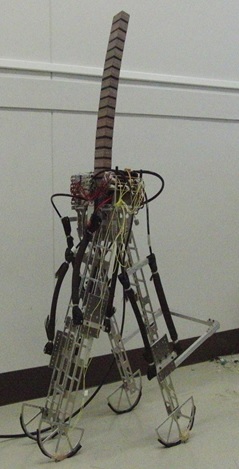
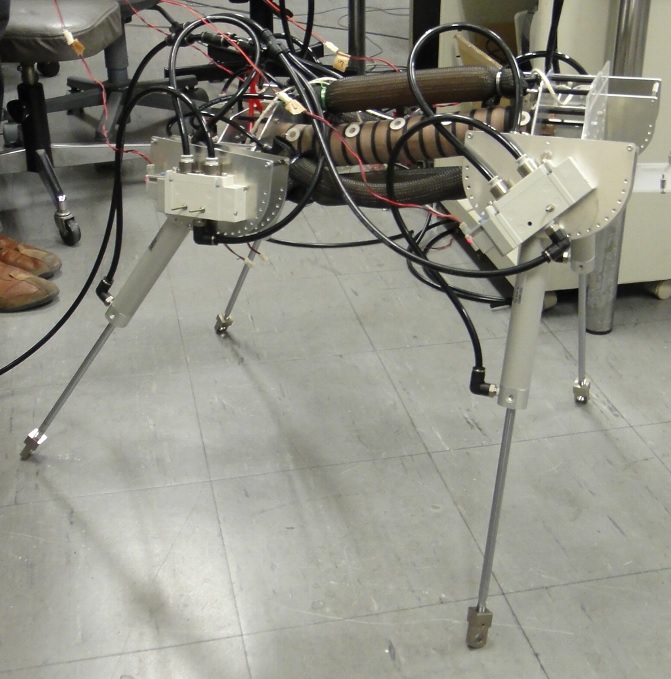
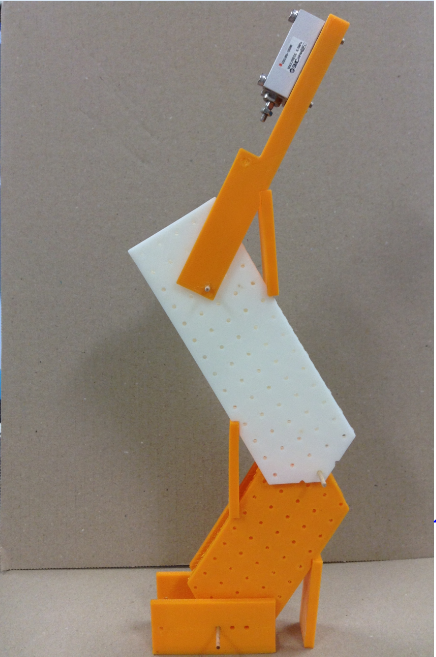
| このロボットは紆余曲折を経て,2019年にようやく歩いた.腕振りと体幹捻りが効いたのだと思うことにしよう. |
|
■ 2016
この年は・・・あれ,意外とあまり作らなかったな.
なおこの年は久しぶりの修論4名.年度明け頃は2名修論で残り2名は来年かなー,とか言っていたのだが,最後は本当にそうなりかけた.

|
■ 2017
この年に海外から留学生がやってくる.
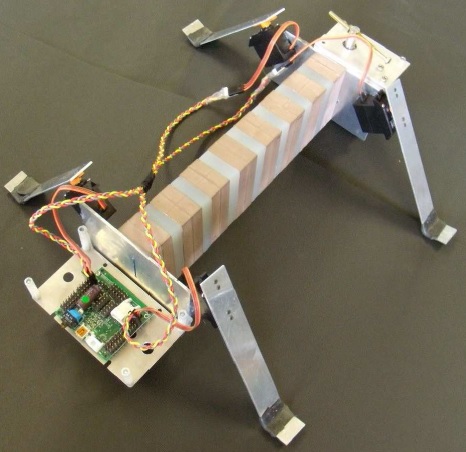
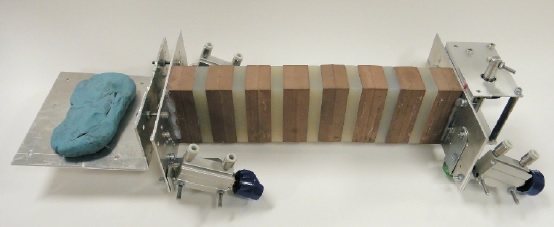
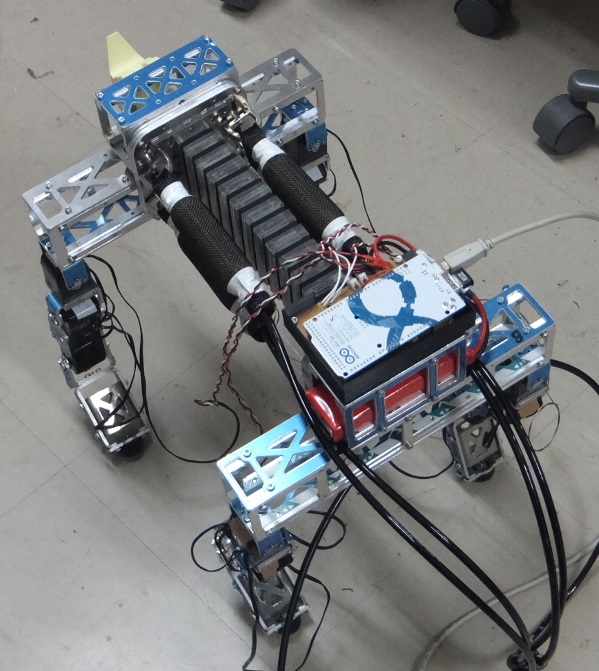
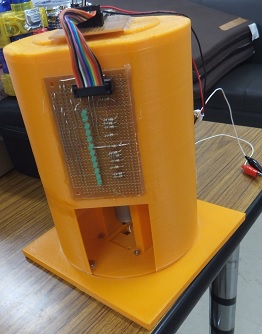
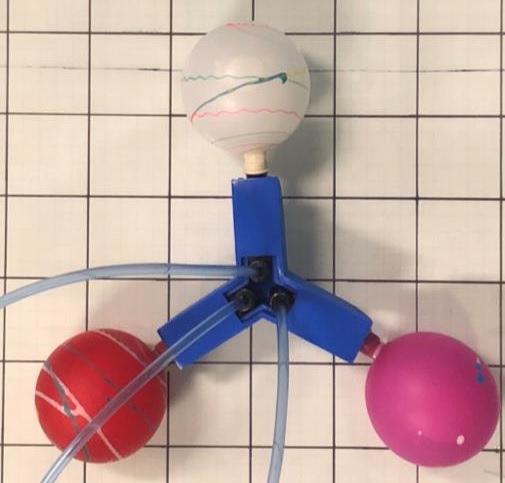
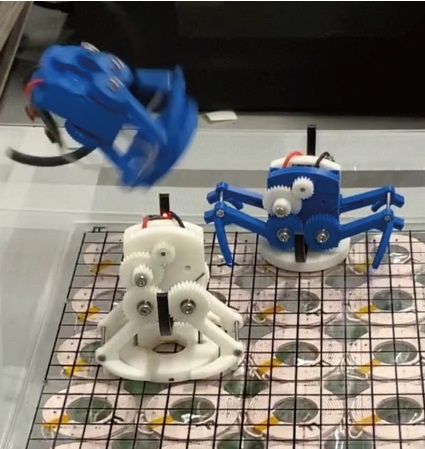
| なお初代は回転部にタミヤのギアボックスを取り付けたが,負荷に耐えられなかったらしく回転しながらギアが粉になって摩耗していった.だいたい1-2時間程度回ったぐらいかなぁ.回路製作はこの年研究室に来ていた留学生にお願いした.回転部と回路・マイコンの台座は四年生が作製した.翌年は回転部を38モータに変更.多分きちんと回るんじゃないかな... |
| なおこのロボットの名前だが,当初"Amoebot"と名付けていた.が,案の定,この手の名前は既に名乗っている論文があり,幻の名前となってしまった. |
■ 2018
この年も色々作ったのだが,研究の都合お見せできないものが多い.ということで,当たり障り無いところで.
|
|
|

■ 2019
平成から令和に.
個人的には盲腸で入院したり車が事故るなど厄年的な感じだった.年齢的に,前厄本厄後厄とも関係ないと思うのだが.
|
|

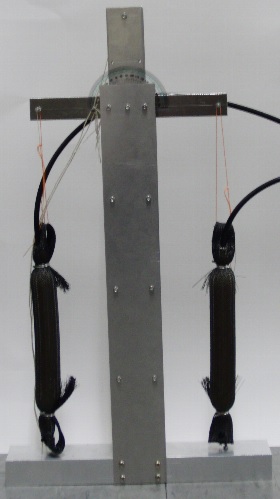
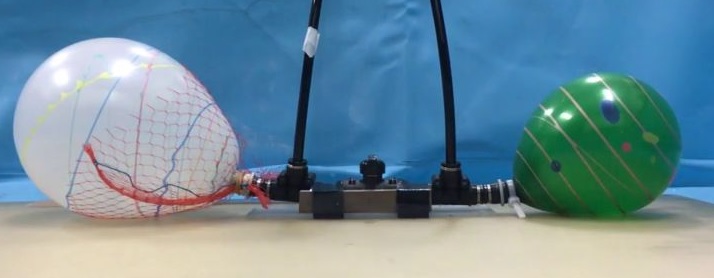
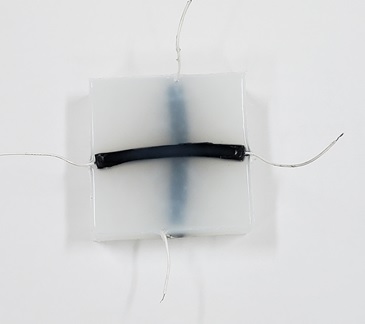
| ちなみに炭素を混ぜたシリコーンの話は,次年度復活する. |
■ 2020
新型コロナと3人の山田.
|
|
|

|