


国際会議への参加のススメロボット工学科
|
 |
|---|
2014.09.04
-

Fig.1 学会の会場周辺,シカゴはトランプタワーなど著名な高層建築物が多くあります
-
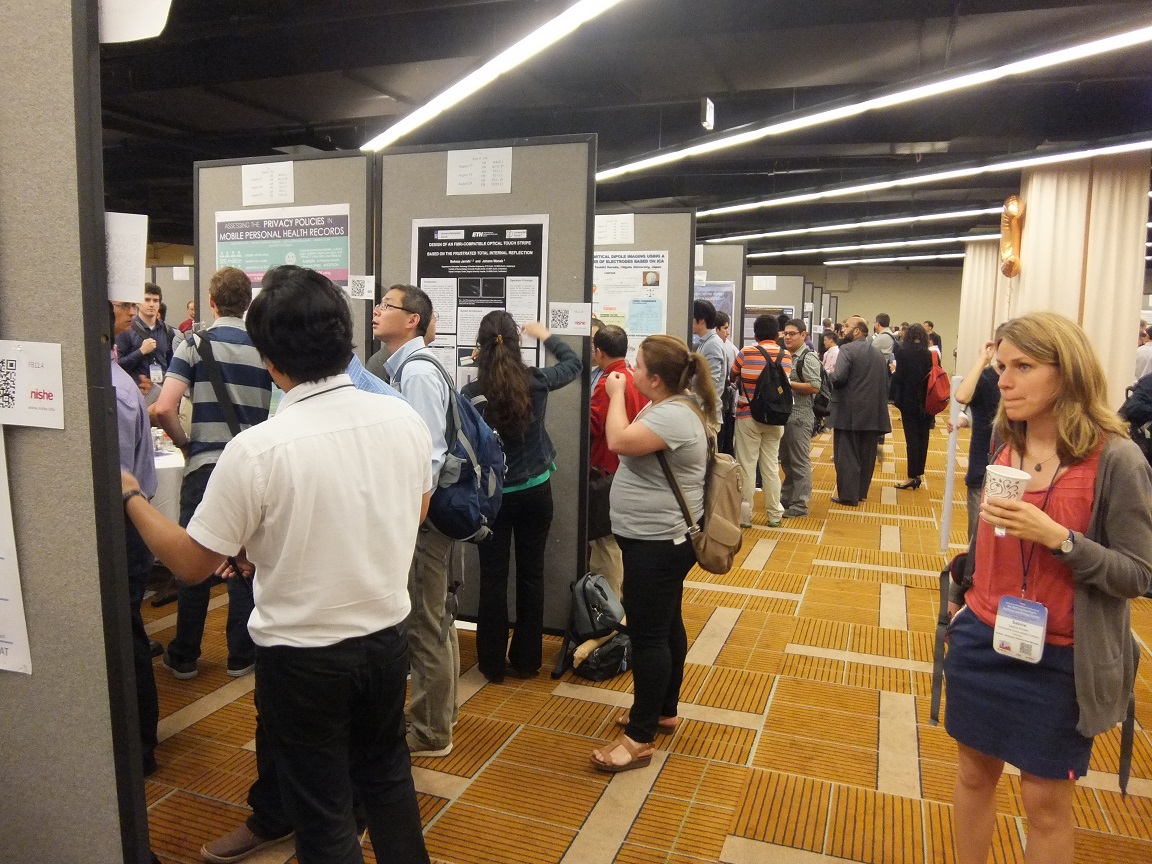
Fig.2 学会のポスタ会場,コーヒー片手に活気のある議論が交わされます
-
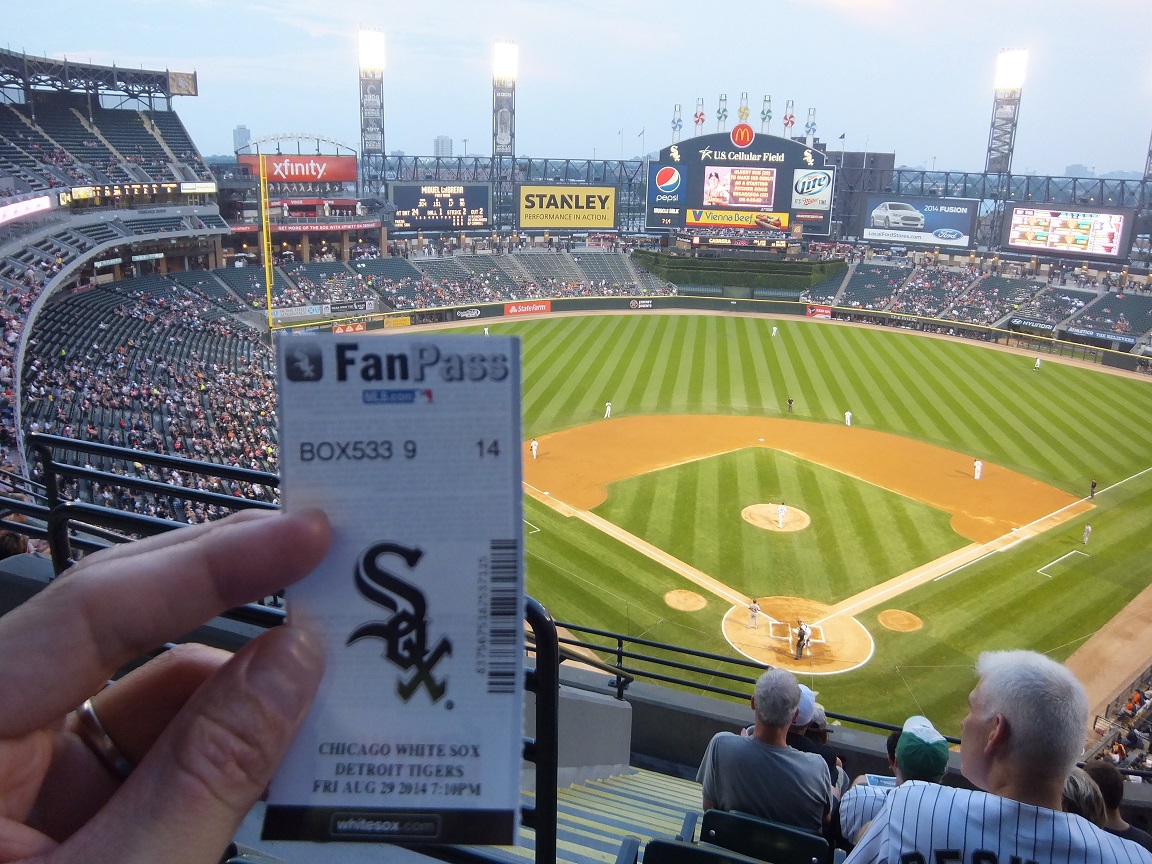
Fig.3 USセルラーフィールド,MLBホワイトソックスの本拠地です
ロボット工学科では,機械・電気電子・計測・制御・情報の各工学分野に「人間」の要素を加えた「人に優しいロボット」をキーワードとして,学際領域の教育・研究を行っています.私が主催する医療ロボティクス研究室では,人と同じ空間に存在し,人と共存協調して作業を行えるロボットを研究しています.現在の適用対象は外科手術で,(1)人と共存して作業できる術具マニピュレータ,(2)人とマニピュレータが協調した作業を行える操作インタフェース,(3)マニピュレータを高機能化する力覚センシング,をテーマとする研究に取り組んでいます.
これらの研究テーマは大きいので,複数のサブテーマに分けて研究を進めて行きます.一つのサブテーマの成果がまとまると,その内容に適した学術雑誌(journal)に論文(paper)を投稿します.例えば,テーマ(1)ではロボットと医学*1,テーマ(3)は生体と計測*2に関する内容です.論文を見たことのない人は,この機会にちょっと覗いてみましょう.注釈番号から検索すると,簡単にヒットします.投稿にあたっては,まず,他機関の研究者が査読(review)を行い,不明点などを照会され,やり取りします.掲載までのプロセスでは多くの場合,2人の査読者(reviewer),編集者(co-editor),編集長(editor)のOKが必要となります.結構,大変です.
研究の途中で得られた成果は,学術会議(conference)に参加して発表し,他の研究者と議論します.テーマ(2)については,2014年の8月末にアメリカのシカゴで開催された,生体と計測に関する国際会議(36th annual international IEEE EMBS conference)で発表しました*3.参加者は2500人以上,参加国は50ヶ国以上,場所は大人数を収容できるシェラトンホテル,発表形式は口頭(oral)かポスタです.学会の会場周辺はFig.1のように,著名な高層建築物がたくさんあります.会議で使用する言語は,多国籍の人々が集まるので英語となります.会場ではアジア圏の若い学生が目立ち,活気に満ちた議論がお国訛りの発音の英語で行われました.ポスタ会場は特に熱気がすごく,Fig.2のように,コーヒーを片手にあちらこちらで説明や質問がされていました.伝えたい・聞きたい気持ちがあると,拙い英語でも専門用語を交えて話が通じます.英語はツールの一つです.学生諸君には学内の支援制度を活用し,積極的に海外で研究発表を行ってもらいたいと思います.
また,海外で発表したご褒美?として,参加者らは積極的に街へ繰り出します.食事,絵画,演奏,スポーツなどの遊びで,本物へ直に触れることは大きな財産となります.例えばシカゴでは,ステーキ・ピザ・ホットドッグ,美術館・博物館,交響楽団・劇場・ジャズ,MLB・NBA・NFL・NHLがあります.MLBホワイトソックスの試合では,Fig.3のように球場の見た目こそ日本と変わりませんが,ボールとバットのミーティング音が聞こえたり,7回表終了時に皆で伸びをしたりなど,TV観戦では分からない本物を味わえます.さらに,その国の文学作品を読むと理解が深まります.ロボットの各工学分野の基礎も教養ですが,さらに幅広い教養を身に着けて,大きな人間となりましょう.たくさんの教養ツールを駆使してこそ,真のグローバルな人材です.若い人ほど効果大です.
*1: Mobile Locally Operated Detachable End-effector Manipulator for Endoscopic Surgery, International Journal of Computer Assisted Radiology and Surgery, DOI: 10.1007/s11548-014-1062-4 (2014/5).
*2: A Method of Measuring Elasticity using the Step-out Phenomenon of a Stepper Motor, Advanced Biomedical Engineering, Vol. 3, pp.14-20 (2014/4).
*3: Hands-free Interface for Surgical Procedures Based on Foot Movement Patterns, the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'14), pp.345-348, Chicago, USA, August 26-30 (2014).
これらの研究テーマは大きいので,複数のサブテーマに分けて研究を進めて行きます.一つのサブテーマの成果がまとまると,その内容に適した学術雑誌(journal)に論文(paper)を投稿します.例えば,テーマ(1)ではロボットと医学*1,テーマ(3)は生体と計測*2に関する内容です.論文を見たことのない人は,この機会にちょっと覗いてみましょう.注釈番号から検索すると,簡単にヒットします.投稿にあたっては,まず,他機関の研究者が査読(review)を行い,不明点などを照会され,やり取りします.掲載までのプロセスでは多くの場合,2人の査読者(reviewer),編集者(co-editor),編集長(editor)のOKが必要となります.結構,大変です.
研究の途中で得られた成果は,学術会議(conference)に参加して発表し,他の研究者と議論します.テーマ(2)については,2014年の8月末にアメリカのシカゴで開催された,生体と計測に関する国際会議(36th annual international IEEE EMBS conference)で発表しました*3.参加者は2500人以上,参加国は50ヶ国以上,場所は大人数を収容できるシェラトンホテル,発表形式は口頭(oral)かポスタです.学会の会場周辺はFig.1のように,著名な高層建築物がたくさんあります.会議で使用する言語は,多国籍の人々が集まるので英語となります.会場ではアジア圏の若い学生が目立ち,活気に満ちた議論がお国訛りの発音の英語で行われました.ポスタ会場は特に熱気がすごく,Fig.2のように,コーヒーを片手にあちらこちらで説明や質問がされていました.伝えたい・聞きたい気持ちがあると,拙い英語でも専門用語を交えて話が通じます.英語はツールの一つです.学生諸君には学内の支援制度を活用し,積極的に海外で研究発表を行ってもらいたいと思います.
また,海外で発表したご褒美?として,参加者らは積極的に街へ繰り出します.食事,絵画,演奏,スポーツなどの遊びで,本物へ直に触れることは大きな財産となります.例えばシカゴでは,ステーキ・ピザ・ホットドッグ,美術館・博物館,交響楽団・劇場・ジャズ,MLB・NBA・NFL・NHLがあります.MLBホワイトソックスの試合では,Fig.3のように球場の見た目こそ日本と変わりませんが,ボールとバットのミーティング音が聞こえたり,7回表終了時に皆で伸びをしたりなど,TV観戦では分からない本物を味わえます.さらに,その国の文学作品を読むと理解が深まります.ロボットの各工学分野の基礎も教養ですが,さらに幅広い教養を身に着けて,大きな人間となりましょう.たくさんの教養ツールを駆使してこそ,真のグローバルな人材です.若い人ほど効果大です.
*1: Mobile Locally Operated Detachable End-effector Manipulator for Endoscopic Surgery, International Journal of Computer Assisted Radiology and Surgery, DOI: 10.1007/s11548-014-1062-4 (2014/5).
*2: A Method of Measuring Elasticity using the Step-out Phenomenon of a Stepper Motor, Advanced Biomedical Engineering, Vol. 3, pp.14-20 (2014/4).
*3: Hands-free Interface for Surgical Procedures Based on Foot Movement Patterns, the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'14), pp.345-348, Chicago, USA, August 26-30 (2014).
