研究テーマ
ROS over WebRTC
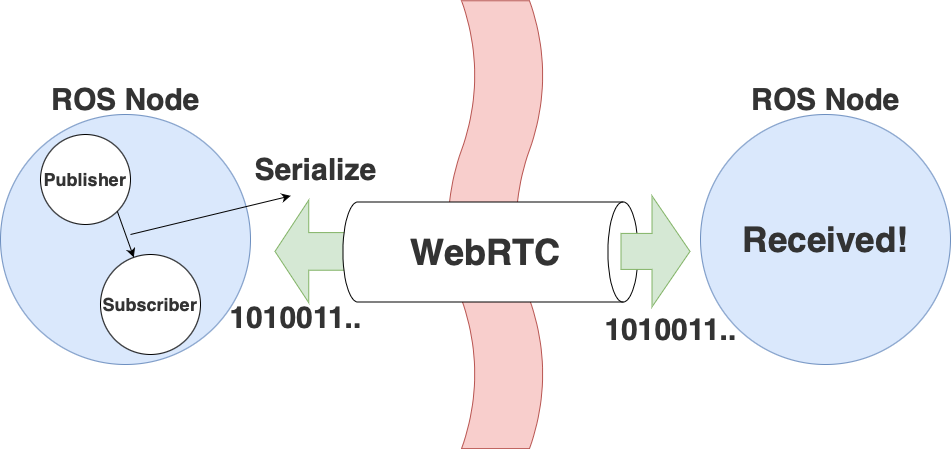
ブラウザによる遠隔操作を実現するに当たり、ファイヤーウォールによって端末間の直接通信を制限、禁止にすることがある。
本研究は、これを解決するためにロボット制御情報を持つROSを端末同士がP2P接続が可能になるWebRTCに乗せることで、セキュリティを保った状態でのリアルタイム性の高い通信を実現するための研究である。
研究担当: 仲田 匠希
ブラウザによる遠隔操作を実現するに当たり、ファイヤーウォールによって端末間の直接通信を制限、禁止にすることがある。
本研究は、これを解決するためにロボット制御情報を持つROSを端末同士がP2P接続が可能になるWebRTCに乗せることで、セキュリティを保った状態でのリアルタイム性の高い通信を実現するための研究である。
研究担当: 仲田 匠希