研究テーマ
視覚に基づく強化学習制御システムの可用性の分析
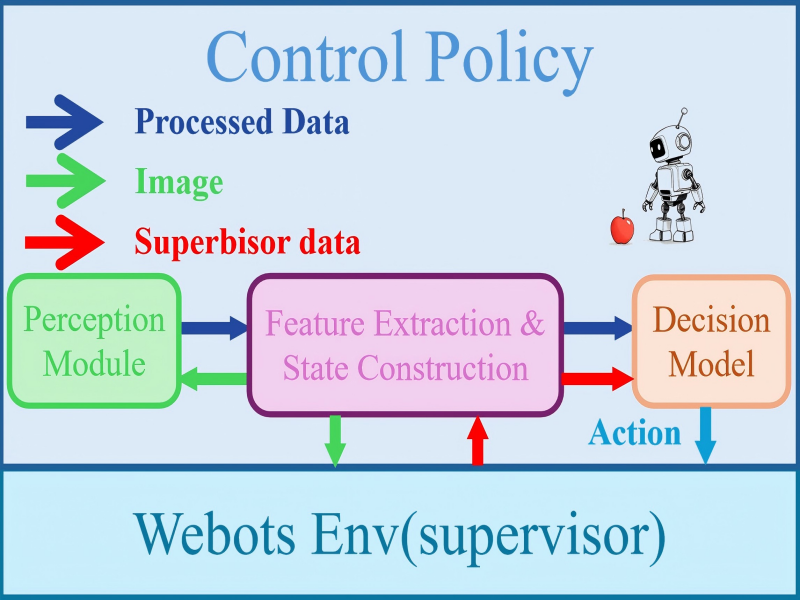
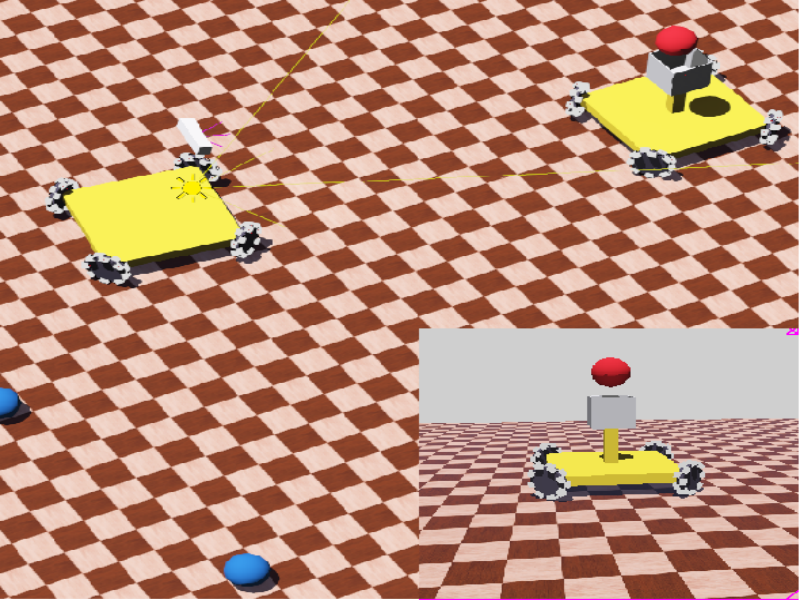
本研究では、ロボットが外界を認識する手段として視覚情報のみに着目し、その認識結果に基づく意思決定を強化学習によって行うことを試みる。これは、人間が主に視覚を通じて周囲の情報を取得し、複雑な課題を遂行する能力に着想を得たものである。ロボットにおいても、優れた視覚アルゴリズムと、人間の脳の意思決定過程を模倣した強化学習アルゴリズムを組み合わせることで、単純なタスクの実行が可能になると考えられる。本研究では、その実現可能性をWebotsシミュレーション環境において検証することを目的とする。
研究担当: 譚 博