知能ロボティクス研究室
大阪工業大学 ロボティクス&デザイン工学部
研究一覧
メンバー
研究実績
研究一覧
メンバー
研究実績
研究紹介
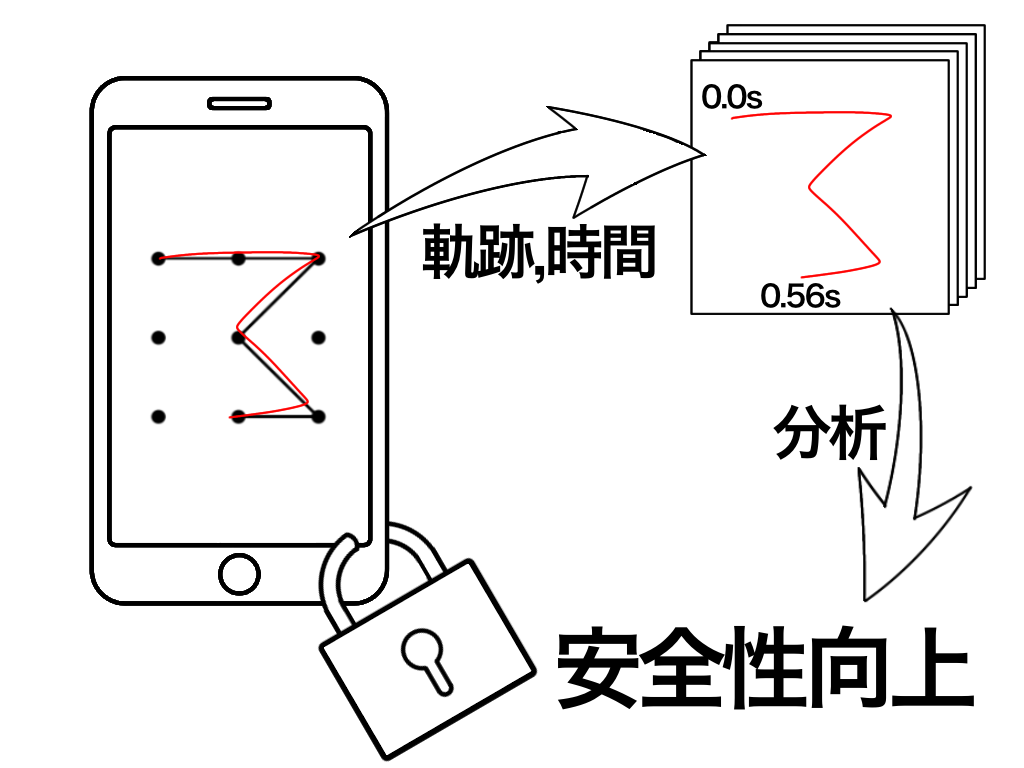
パターンロック解除時に得られる特徴量による安全性向上
片手でパターンロックを解除する際の指の軌跡や解除までの時間、点から点までの時間などの個人差を抽出することでより安全なロックをかけることを目的としています。
研究担当 : 佐子 陸人