研究紹介
並列化したニューラルネットワークを用いた群ロボットタスクの効率化
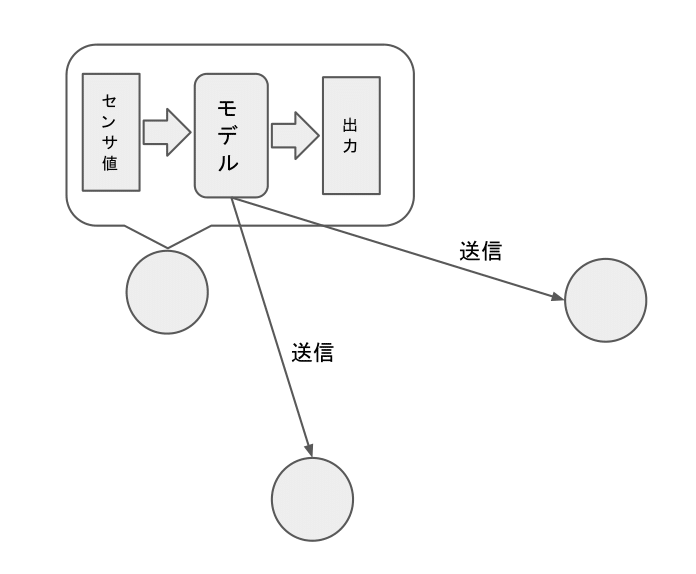
群ロボットは、単に数を増やせばタスクの実行効率が線形的に増加するわけではありません。
そこで、センサ値のニューラルネットワークの入力とし、重みを送受信することで、タスク実行効率を大きくすることを目標とします。
研究担当 : 竹内 康二
群ロボットは、単に数を増やせばタスクの実行効率が線形的に増加するわけではありません。
そこで、センサ値のニューラルネットワークの入力とし、重みを送受信することで、タスク実行効率を大きくすることを目標とします。
研究担当 : 竹内 康二