システム最適化研究室
| 担当:重弘裕二 | |||
| 場所 | |||
| 大宮キャンパス 4 号館 5 F | |||
| 研究について | |||
| システムの最適化とは | |||
| 確率を利用する (大学のHPの「研究室VOICE」に掲載していただいた原稿と同じです) | |||
| 研究テーマとスタッフ (2023 年度) | |||
| 逆再生学習による追跡捕獲ロボットの行動獲得に関する研究 | |||
| R. K. | |||
|
|||
| 強化学習における学習時の初期配置が与える影響 | |||
| N. S. | |||
|
|||
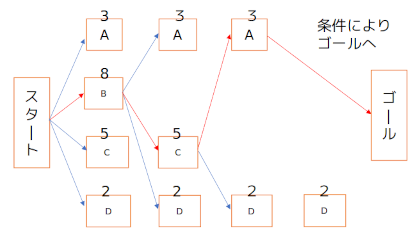
| 観光順路最適化に対する 2 つの手法の評価 | |||
| K. M. | |||
| 観光順路最適化問題に対する列挙法の適用 | |||
| S. K. | |||
| 観光順路最適化問題に対する貪欲法の適用 | |||
| S. D. | |||
|
|||
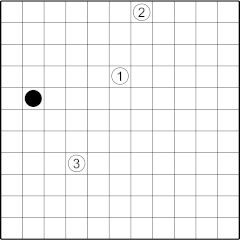
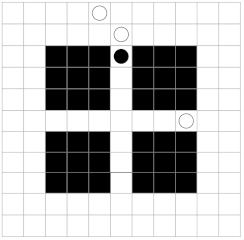
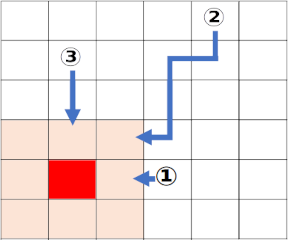
| 上下移動箇所を制限した 3 次元追跡捕獲問題における捕獲エージェント構築 | |||
| N. N. | |||
| 上下移動箇所を制限した 3 次元追跡捕獲問題における盤面評価手法 | |||
| T. T. | |||
| 上下移動箇所を制限した 3 次元追跡捕獲問題における教師データ生成手法 | |||
| T. M. | |||
|
|||
| 逃走エージェントの行動方法が追跡捕獲に与える影響 | |||
| U. B. | |||
| より困難な問題における逃走者追跡捕獲システムの評価 | |||
| S. K. | |||
| 障害物のある広い盤面で追跡するシステムの評価 | |||
| Y. M. | |||
|
|||
| これまでの研究内容 (一部) 紹介 | |||
| 学会発表資料 | |||
| 組合せ最適化に関する一つの仮説 | |||
| 制約伝播に基づくシフトスケジューリング(お手本のような発表です) | |||
| 逆自己畳み込みアルゴリズム | |||
| 遺伝的アルゴリズムによる鉄道ダイヤの最適化 | |||
| 大規模組合せ最適化問題に対する複数の近傍を用いた探索手法 | |||
| 改善解探索速度を考慮したエージェントによる探索手法を用いたフィルタ回路合成 | |||
| 遺伝的アルゴリズムを用いた交通渋滞解消のための経路選択手法 | |||