スマート材料アクチュエータ
■3自由度薄型誘電性エラストマーアクチュエータに関する研究
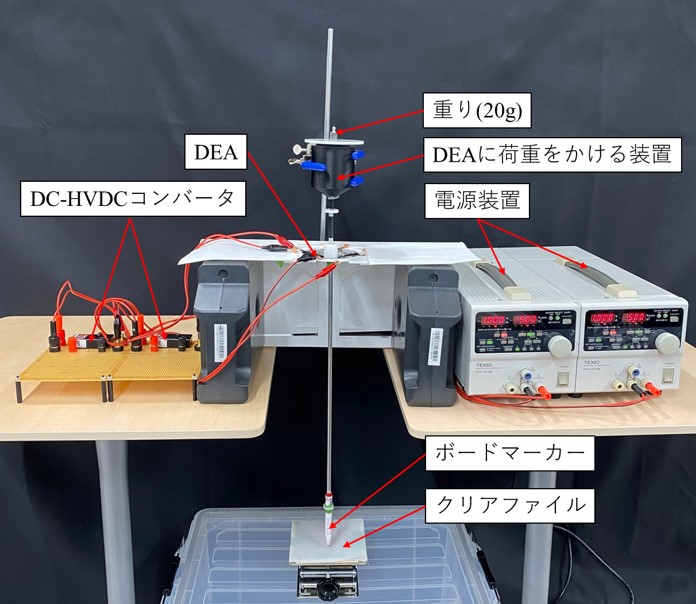
近年、人工筋肉やソフトロボットの性能向上を目的とし、スマート材料である誘電性エラストマーアクチュエーターが注目されている。 誘電性エラストマーとは電場により大きなひずみを生成するエラストマーである。 本研究ではアクリル系エラストマーとカーボングリスを利用し、3自由度薄型誘電性エラストマーアクチュエータを製作する。そして、開発した薄型アクチュエータに基づいて、文字書きなどの応用例を発想し、制御系の設計および実機実験を行う。
■薄型誘電性エラストマーアクチュエータのセルフセンシング化に関する研究
スマート材料である誘電性エラストマーが外力を受け、変形する際に自身の静電容量が変化する。本研究では静電容量変化とその変形量の関係によってセンシング用のモデルを構築する。実用化する際に小型化・軽量化を図るために、外部計測器を使わず、薄型誘電性エラストマーアクチュエータにセルフセンシング機能を搭載することを目指す。
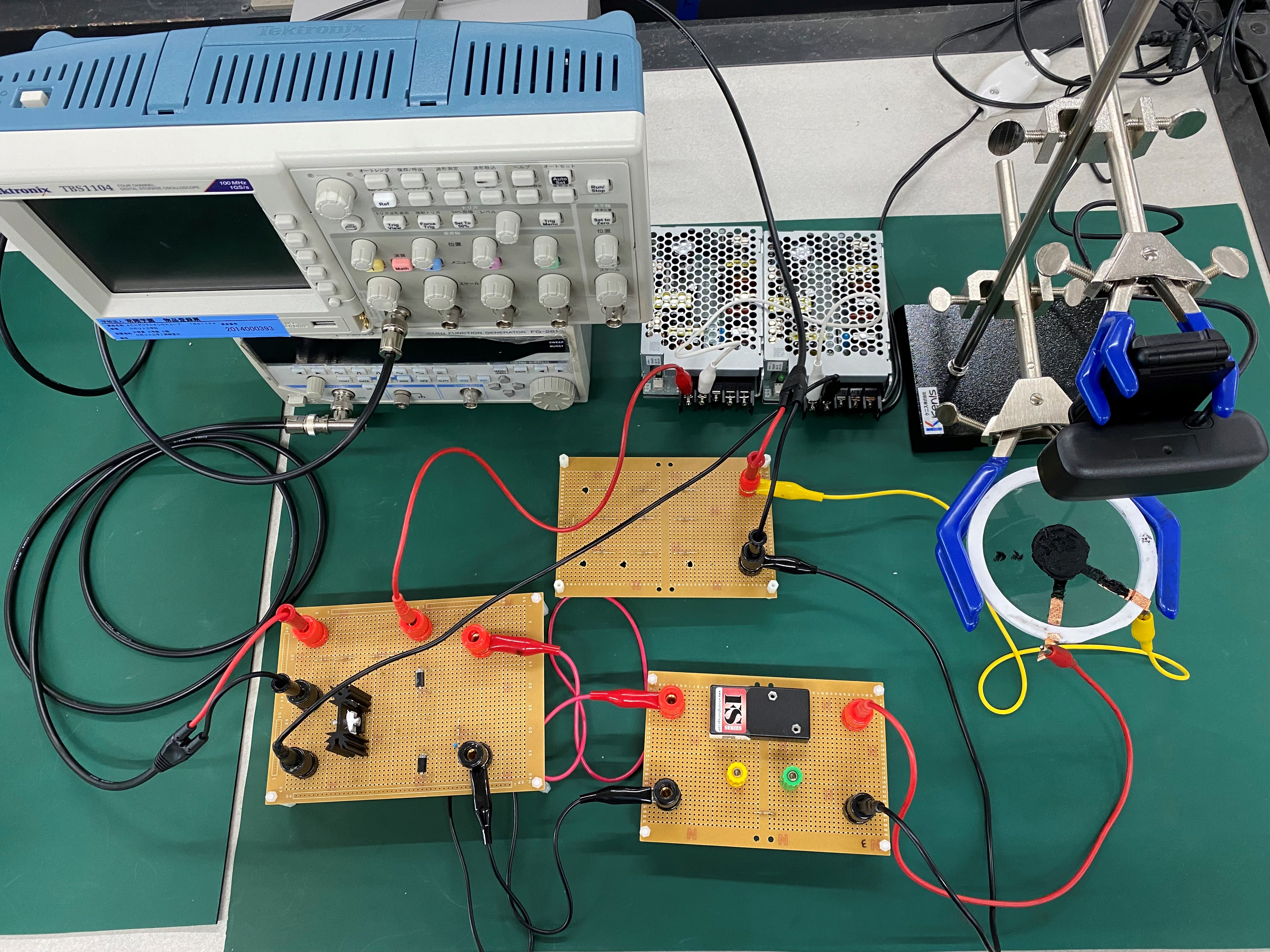
■釣糸アクチュエータに関する研究
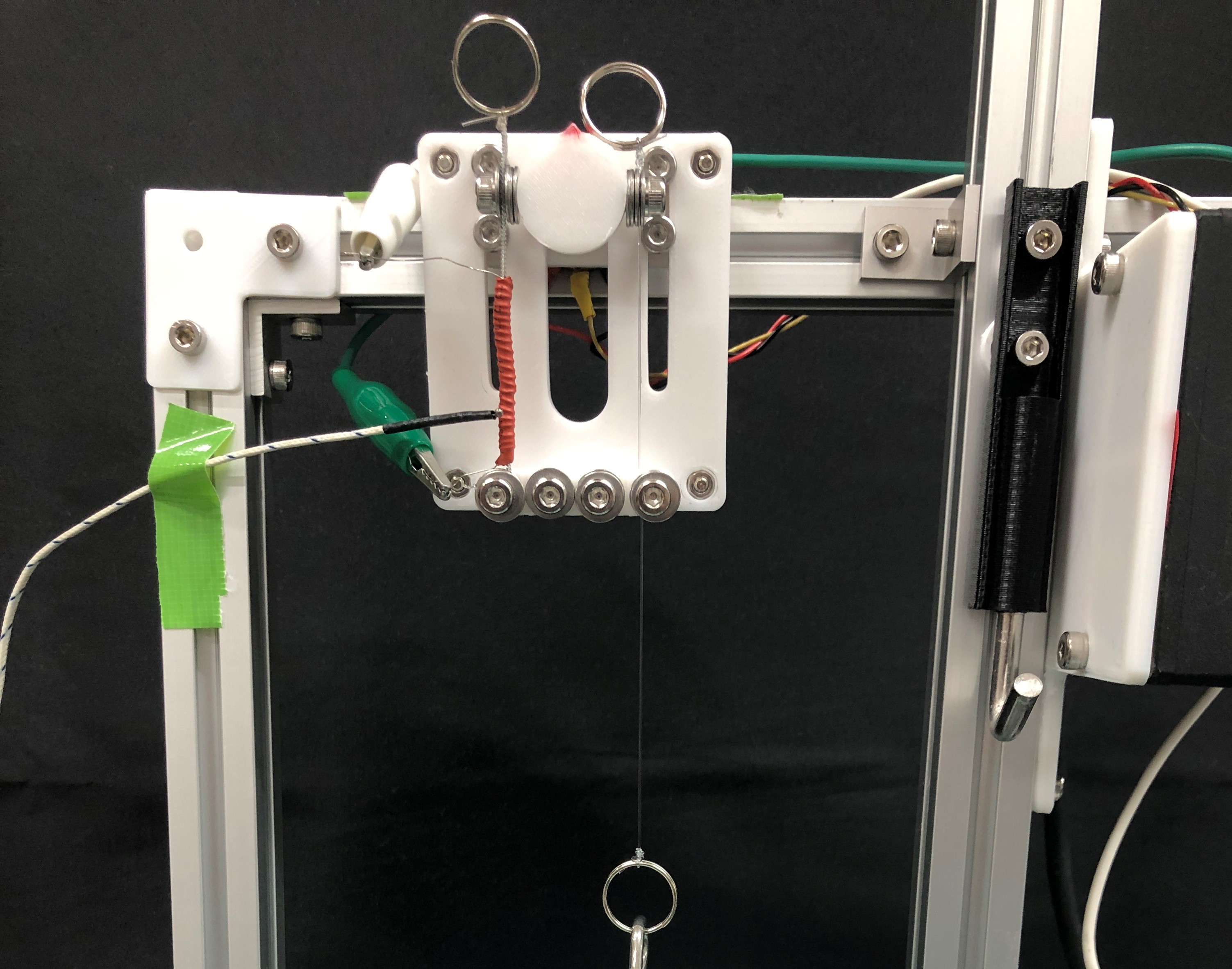
近年、ソフトアクチュエータへの注目が高まっている。2014年にナイロン繊維にねじりを与えることで作られる釣糸アクチュエータが発表された。本研究では、ロボットに応用できる釣糸アクチュエータに基づく駆動ユニットを開発し、動作性能を向上させるためモデルの構築および制御系の設計を行う。
■触覚計測・提示装置に関する研究
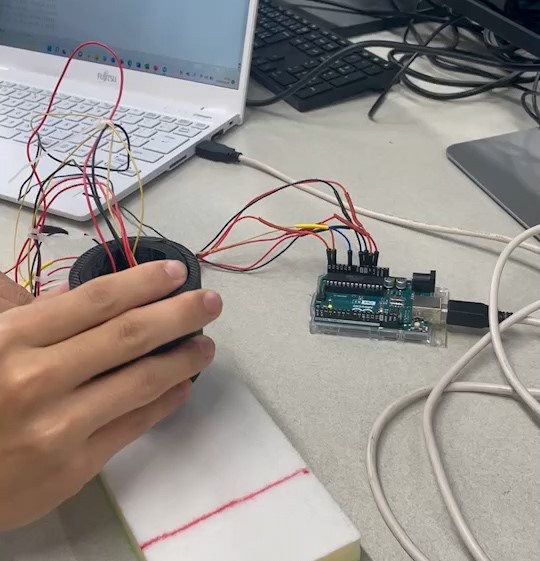
近年、触覚計測・提示はバーチャルリアリティ、医療福祉、IoTなどの分野で注目されていて、様々な研究では触覚を計測と再現するデバイスが多く開発されている。本研究では、振動、力、温度など様々な観点から素材表面の質感を認識するデバイスを開発し、実機実験で質感モデルを構築する。そして、この質感を再現する触覚提示デバイスを試作し、オンラインショッピングなどの分野に実用できることを目指す。
介護支援ロボット
■非把持双腕ロボットによる2リンク物体の姿勢維持制御に関する研究

本研究では、被介護者を角度フリーの3リンクとし、非把持双腕ロボットを介護者として双腕の抱き上げ動作についての研究を行っている。実際の介護の現場において,介護者が腕を速く動かすことで,被介護者に恐怖や痛みを感じさせてしまう可能性があるため、被介護者の心的状態を考える必要がある。そのため、ずれ・落下を防ぎ,被介護者に安心と快適さを与える制御方法を提案する。