照明光の個体差を用いた自己位置推定技術: CEPHEID
研究担当: 小林 裕之
![[lights are not identical]](../images/research_cepheid.jpg)
照明光には個体差がある ---
研究室で発見したこの事実に基づいた照明光個体識別および屋内自己位置推定技術がCEPHEID(Ceiling
Embedded PHoto-Echo ID; セファイド)です。
CEPHEIDでは照明光が持つ(おそらく製造時の部品等の品質のばらつきに由来する)個体差を深層学習を用いて識別します。
そのためインフラストラクチャーレスな自己位置推定が可能です。
ちなみに、宇宙にはCepheid変光星という種類の恒星があり、銀河までの距離推定(一種の自己位置推定?)に使われています。
深層学習で不良パンを探せ! (伏兵版)
研究担当: 小林 裕之
![[bread]](../images/research_bread2.jpg)
パンの製造時には焼きむらなどに起因する不良品が発生します。
パンは製品としての個体差が大きい上、不良箇所のパタンも多岐にわたるため従来型の画像処理では認識が極めて困難です。
そこで深層学習を用いて不良パンの検出を行います。
この【伏兵版】では高画素画像を多数に分解して少ない学習サンプルから効率的な学習を行います。(パン画像をクリックしてみてね!)
試薬の異物検出
研究担当: 植田 翔太

現在、試薬中の異物検査は人の目で行われており、効率化が求められています。
本研究では3次元畳み込みニューラルネットワーク(3D-CNN)を用いて、試薬の異物を学習させ、
機械的に試薬中の異物を検出することを目的としています。
ニューラルネットワークを用いた群ロボットタスクの効率化文学作品の現代語翻訳
研究担当: 竹内 康仁
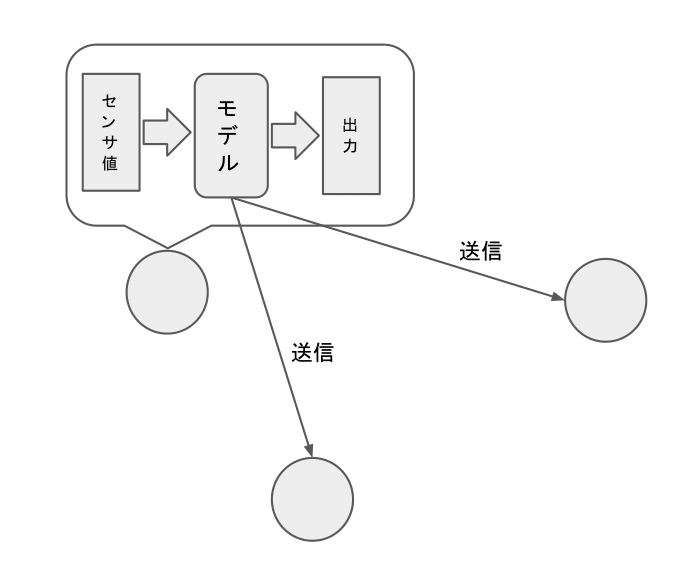
群ロボットは数を増やせば、タスクの実行効率が線形的に増加するわけではない。
そこで、センサ値をニューラルネットワークの入力とし、重みを送受信することで、
タスク実行効率を大きくすることを目標とします。
深層強化学習を用いた複数の手段を有効に活用した移動の獲得
研究担当: 藤崎 優樹
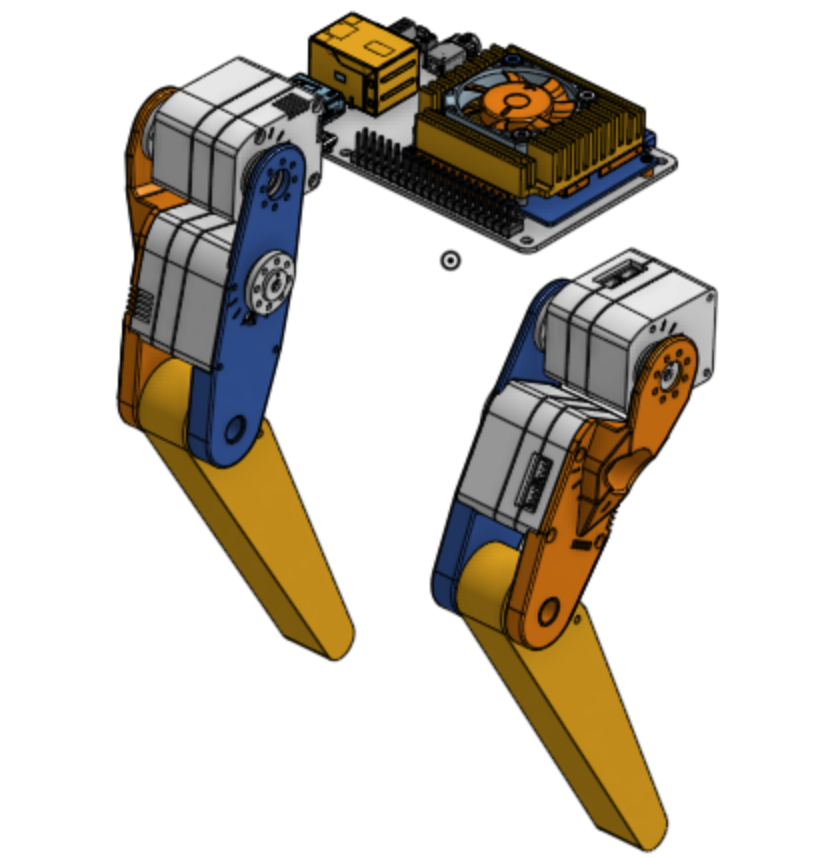
深層強化学習を使用して複数の移動手段(今回は車輪と脚)
を持つロボットが各状況下に置いて適切に車輪と脚を使い分けながら移動するシステムの獲得を目的としています。
入力文書に対する感情推定
研究担当: 永安 夢
本研究ではTwitterから収集した感情のデータを元に正解のデータとなるラベル付きデータを作成し、訓練を行いモデルを構築し入力された文書の
感情推定を行い感情をスコア化し、感情を可視化することを目的としています。
研究担当: 坪田 貴士
本研究では、Wikipedia日本語記事から作成した感情語辞書を用いて人の会話の感情推定を行い、
その結果からより適切な応答ができる会話ソフトウェアの開発を目指しています。
深層学習を用いた複数のDos攻撃の侵入検知(NIDS)
研究担当: 小澤 陸人
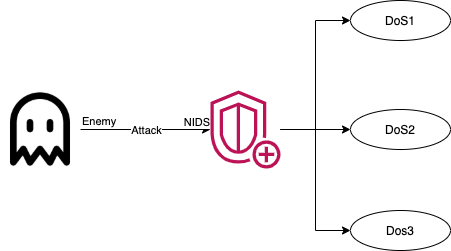
ネットワークセッションのビッグデータに対して深層学習を用いることで、単に侵入検知をするだけでなく複数のDos攻撃を検知しクラスタリングすることを目指します。
形態素解析を利用した画像キャプション機能の向上
研究担当: 加藤 大吾
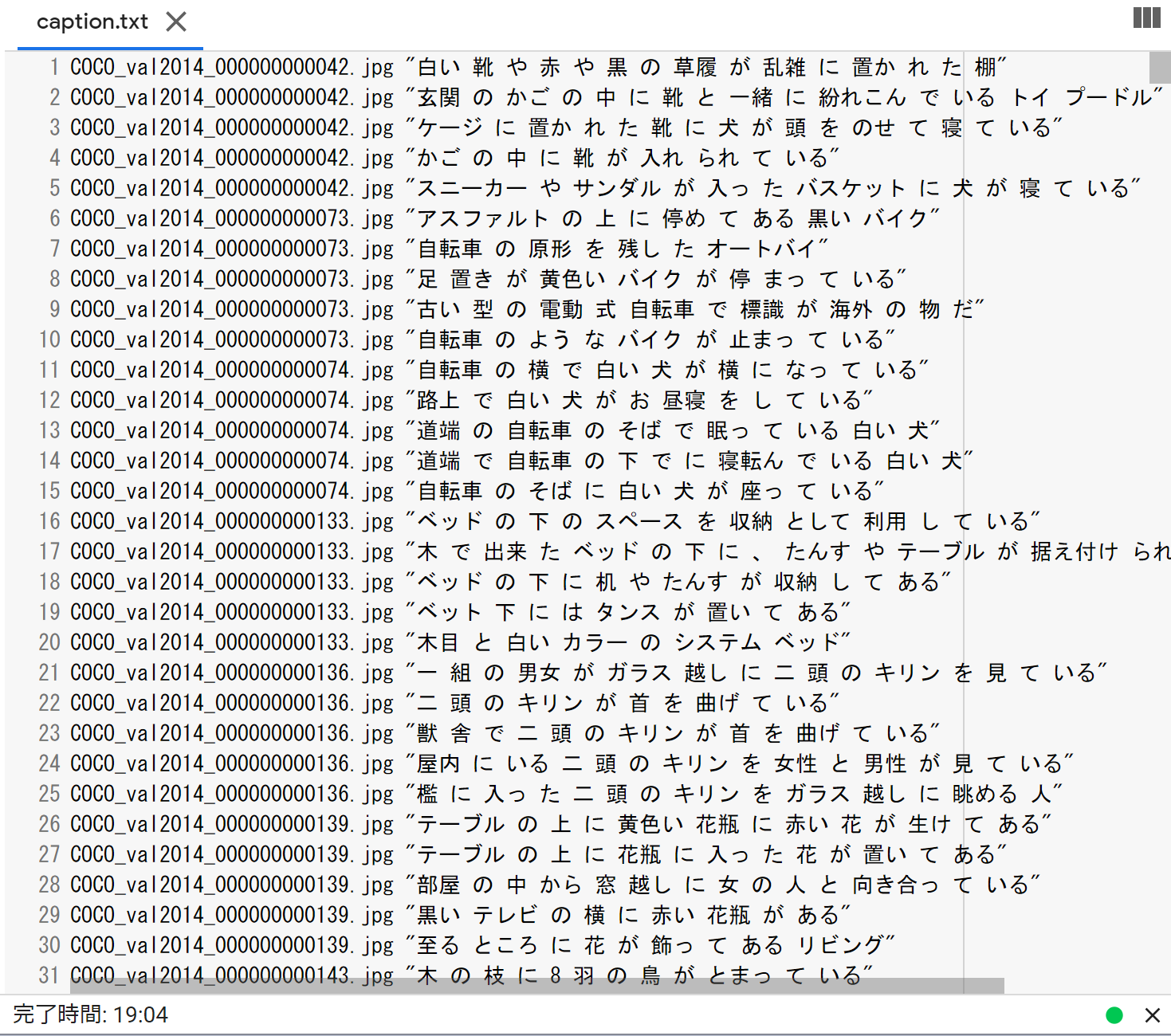
画像キャプションで出力されたテキストデータを自然言語処理にかけて、
分かち書きののちに自動生成でより詳細な内容を出力できるように改良します。
深層学習を用いた画像へのQRコードの埋め込み
研究担当: 熊渕 叶流

本研究では卒業された山内さんの研究の引き継ぎをしています。オートエンコーダーを用いて画像へのQRコードの埋め込みを目的とした研究です。
3Dプリンタの動作音からの異常検知
研究担当: 泉水 陸志
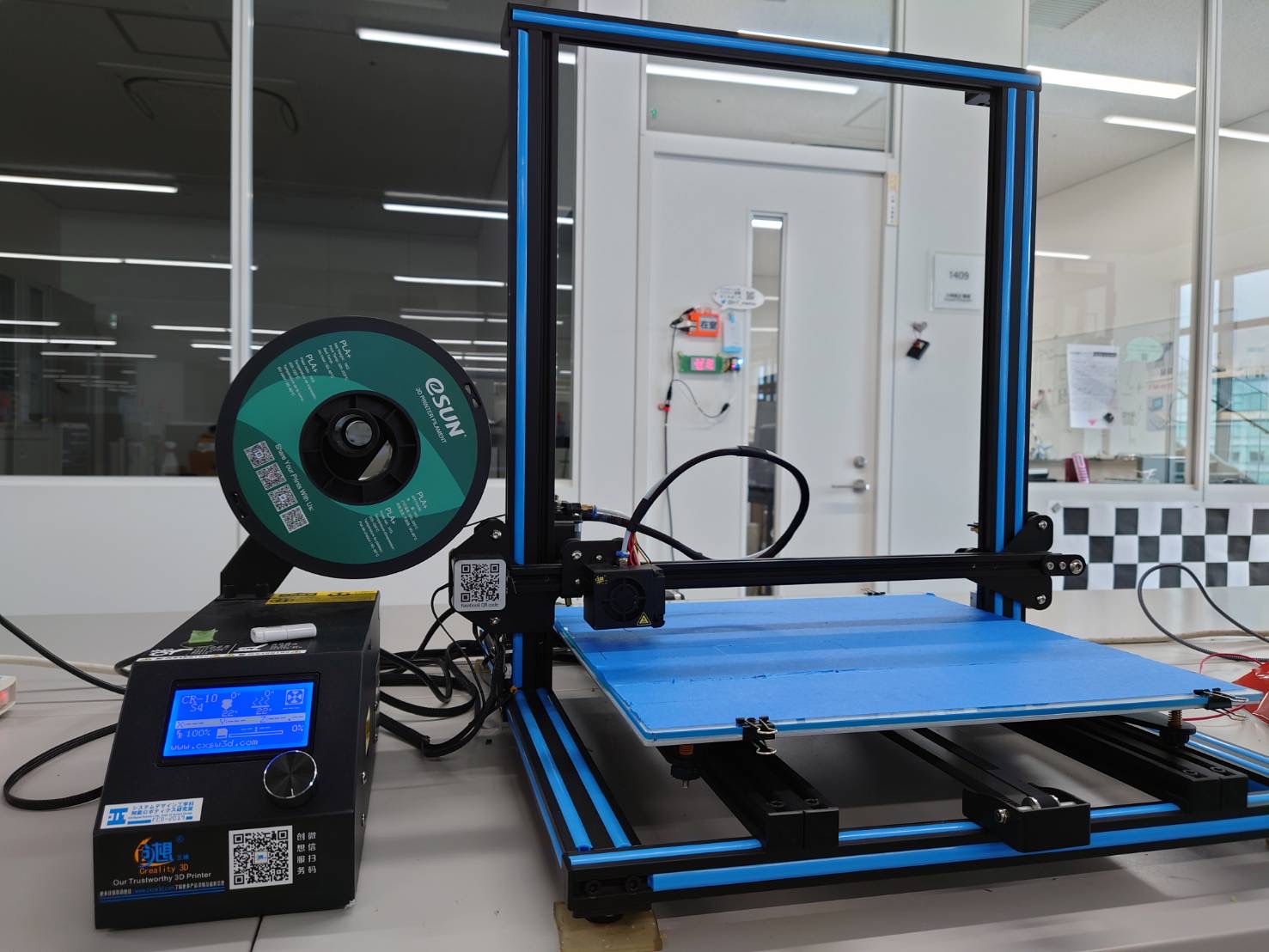
3Dプリンタで印刷する際に造形物がベッドに定着しなかったり倒れたりすることで失敗することがあります.動作音から異常を検出し造形に失敗していると判断した場合には失敗していることを知らせます.
CEPHIEDのWebアプリ化
研究担当: 中村 仁大
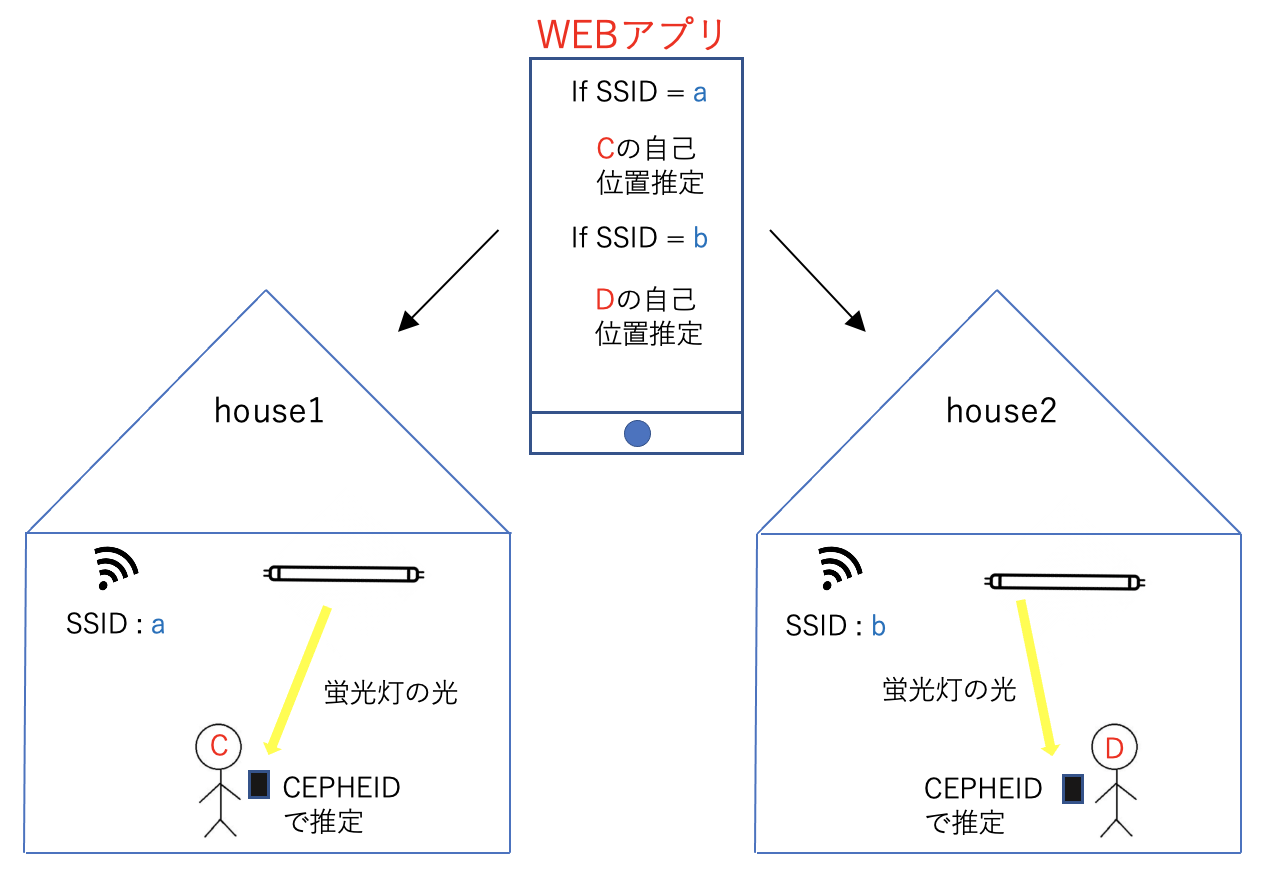
小林裕之教授が研究しているCEPHEIDの応用としてRuby on
Railsを用いてWebアプリを作り, 一つの決められた場所だけではなく,
様々な場所で自己位置推定できるようにすることを目標に研究しております。
Wi-FiのSSIDを読み取って大まかな位置を推定し,
大まかな位置から蛍光灯の光を用いてCEPHEIDで正確な位置を推定します。
機械学習を用いた手書きストローク補正
研究担当: 吉田 天河
現在、手書き図形の補正は平均化処理・書ききった後に図形を分類してコンピュータが綺麗に描くなどの実用化がなされています。
本研究では機械学習を用いて各時刻のパスを回帰予想し、書きながらの補正を施すことを目指します。
照明光の個体差を用いたスタンドアローン自己位置推定
研究担当: 藤崎 優樹

従来は取得した照明光をクラウド上のAIで識別していましたが、ネットワークなどに繋げない環境下は自己位置推定を正確に行えませんでした。
そこで本研究ではデバイスのみで完結した自己位置推定を目指します。
文学作品の現代語翻訳
研究担当: 竹内 康仁

明治時代から昭和初期の文学作品は旧字体や文語で書かれているため、容易に読むことが難しいです。
そこで本研究では、ニューラル機械翻訳(NMT)を用いて文学作品を現代語へ翻訳することを目指します。
研究・教育目的の自動運転プラットフォームACTTの開発
研究担当:
中本 直宏 (2020年度卒)

近年、自動運転が多くの大学や企業によって実用化に向け開発されています。
ですが、仮に自動運転が実現できれば、多大な技術者不足になると懸念されています。
そこで、ACTT(Autonomous Car Technologies
Testbed)の開発を行っています。
自動車と同サイズの実験車両を用いて行う研修では様々なコストがかかり最適な手段とはいえないと考えました。
「教育や研究においてはACTTが最適である」となることを目指しています。
畳み込みニューラルネットワークを用いたQRコード隠蔽に関する研究
研究担当:
山内 康平 (2020年度卒)

ディープラーニングの代表的な手法である、畳み込みニューラルネットワーク(CNN)を用いて、カラー画像の画質を
損ねることなくQRコードを埋め込み、埋め込んだQRコードをQRコードリーダー等で読み取りが行える状態で復元することを目的として研究をしています。
IoTを用いた作業の効率化
研究担当: 池田 英悟(2020年度卒)

ベアリング工場において、事務作業や在庫管理などを現在は手作業で行われています。
そこでRaspberry PiやGoogle
HOME等用いて作業の簡略化を図ることで、作業の効率化を目指します。
敵対的生成ネットワークを用いた深度画像からRGB画像の生成
研究担当: 寺田 篤史(2020年度卒)

本研究では敵対的性瀬ネットワーク(GAN)を用いて、深度センサから得られた画像からRGB画像を生成させることを目指しています。
QRコードを用いた道案内WEBアプリの開発
研究担当:
橋本 拓哉(2020年度卒)

本研究では、QRコードからアクセスすることができる、アプリのダウンロードが不要な道案内WEBアプリの開発を行っています。
ダウンロードが不要故に、手軽に道案内システムを導入できるシステムを目指しています。
GASを用いた受注管理の効率化
研究担当: 小池 亮(2019年度卒)

鍍金工場において、手作業で行ってきた事務作業や受注管理を自動化することを目的としています。
データを全てクラウド上で保管し、受注から納品までの工程をQRコードのついたタグで一括管理することで作業の効率化を図ります。
深層学習を用いたパンの不良品の識別
研究担当: 膽吹 直諒(2019年度卒)

パン工場の製造過程において小さいコゲや白い粉が付着している不良品を分別する必要がある。
現在は人の目視で検査しており、自動化を目標に深層学習を用いて不良品のパンを識別する。
特にロールパンは他の製品と違い、焼きムラや大きさが違うため難しい。
前庭感覚刺激を利用した情報通知システムの開発
研究担当: 清水 晃輝(2019年度卒)

人の頭部に電流を流すことで、平衡感覚を操作する前庭電気刺激というものがあります。
この前庭電気刺激を用いることで、直感的で新しい情報通知を行います。
QRコードを使った移動ロボットの自己位置推定
研究担当: 武谷 諒(2019年度卒)

QRコードをカメラで撮影することによって撮影位置と撮影姿勢を推定できる手法を本研究室で開発しています。
本研究ではこの手法をルンバなどの移動ロボットに実装し、ロボットの制御に応用しています。
詳細な説明はコチラ!
超音波を使ったロボットの自己位置推定
研究担当:
高垣 哲也(2019年度卒)

超音波センサを複数使い(超音波センサアレイ)、位置や姿勢を求めることを目的としています。
周り全体に向けて複数の周波数の超音波を発し、発信波と受信波をディープラーニングで学習することで位置・姿勢を求めます。
深層学習を用いたRGB画像からの深度画像生成
研究担当: 藤野 愛翔(2019年度卒)

深層学習の手法の1つである敵対的生成ネットワーク(GAN)を用いて、スマートフォンなどの赤外線カメラや深度センサを搭載していない単眼の
RGBカメラで撮影された画像から深度画像を生成することを目的とした研究を行っています。
小型人工衛星の汎用コンピュータを用いた制御
研究担当: 膽吹 直諒(2019年度卒)

現代の小型人工衛星の多くは宇宙の過酷な環境に耐えうる、特殊なコンピュータを用いて制御されています。
そのため、ソフトウェアの開発環境も特殊になり、開発コストの増加の原因の一つになっています。
そこで、本大学で開発している小型人工衛星PROITERESシリーズでは、汎用のソフトウェアが動作するRaspberry
Piを搭載し、制御を行います。
本研究では、宇宙環境における汎用コンピュータの動作実験及び課題の解決を目的としています。
AR を用いた回路基板組立作業支援システム
研究担当: 清水 晃輝(2019年度卒)

AR技術を用いて作業者に部品の取り付け位置や向きなどの情報を提示する回路基板組立支援システムです。
このシステムを使うことで、はじめて作業する人や子供でも簡単に基板を組み立てることができます。
照明光の個体差のマイコンによる識別
研究担当: 木崎 裕大(2018年度卒)

CEPHEIDの前身となる研究で、照明光の個体差を周波数領域のピーク値を比較することで行います。
本研究では一連の処理をすべてマイコンに実装しています。
機械学習によるQRコード検出における学習用画像生成の透視変換を用いた効率化
研究担当:
白浜 遼太郎(2018年度卒)

QRコードが二次現状であることを利用し、一枚のQRコードの画像を様々な角度で撮ったように変換して増やし、機械学習の学習用画像の生成の作業効率化となるかを検証する。
また、学習用画像に従来の水増し手法のみを施したものと本研究の手法に従来の水増し手法を使用したものを比較したとき、検出速度に差は出るのか検証する。
ウェアラブル端末を用いた振動障害予防システム
研究担当: 小林 裕之

工事現場等で用いる動力工具は、振動障害(白蝋病に代表される疾患)の原因となります。
WHO
や厚生労働省からはこれを予防するためのガイドラインが示されていますが、振動被爆時間の正確な把握が必要なため、現場で厳密に用いることは困難です。
本システムは、ウェアラブル端末(Android Wear のスマートウォッチ)
を用いて工具の仕様時間を正確に測り、必要であれば警告を通知することができます。
また、複数の作業者の計測結果は現場や本社のタブレット端末等で一括して管理することも可能です。
生体信号ストリーミングアンプ: VAMPIRE-BAT シリーズ
研究担当: 小林 裕之
![[VAMPIRE-BAT]](../images/vbwasps_exp.jpg)
遠隔操作でアナログ/ディジタルパラメタを設定可能な無線式生体信号ストリーミングアンプVAMPIRE-BAT
シリーズです。 (写真のケーブルの先は電池で、データは無線伝送。)
-
VAMPIRE-BAT: 最大2000
spsでEMG/ECGをリアルタイムに無線取得可能。吸血コウモリの如く生体信号を吸う。
(VAMPIRE-BAT=Variables Adjustable Multi-Purpose Intelligent
Remote-controlled Electrode for Bio-signal Amplification and
Transmission)
-
VB/WASPS:
高電圧電気刺激フィードバック拡張版。スズメバチ(wasp)の如く刺す。(WASPS=With
Accurate Sensing Point Stimulation)
-
WIVERN:
IoT対応版。データが飛龍(wivern)の如く世界を駆ける。(WIVERN=Web-Interfaced
Vampire-bat for Extended Range Networking)