マルチロータ型UAV (Unmanned Aerial Vehicle) に対するロバストな制御系設計を行います.
マルチロータ型UAV

マルチロータ型UAVは4つから8つの単純回転を行うロータから構成される航空機です.シングル・ツインロータ型ヘリコプタよりも構造が単純であり小型化が可能であることから近年盛んに研究されています.空撮・ホバリングによる定点監視・警備・物資の搬送などの用途での活躍が期待されています.
このマルチロータ型UAVの自動制御に関する研究を行っています.以降で制御の方法を記載します.
非線形のロバスト制御
マルチロータUAVは強い非線形性を持っています.そのため,従来の線形制御の枠組みではうまく制御することができません.また同時に,風の影響やバッテリ電圧の変動によるロータ出力の変化など,常に環境が変化するため,これらの不確かな要素を取り扱う必要があります.これらの問題をフィードバック線形化とスライディングモード制御により解決します.
フィードバック線形化
フィードバック線形化は現在最も有効であるとされる非線形を取り扱うための枠組みの一つです.これによってマルチロータ型UAVの強い非線形性の制御を行います.
スライディングモード制御
フィードバック線形化は有用な方法ですが,制御対象が不確かである場合には完全な線形化を達成することができません.線形化できなかった部分はスライディングモード制御によって取り扱われます.下図は2次システムの場合の位相平面図です.
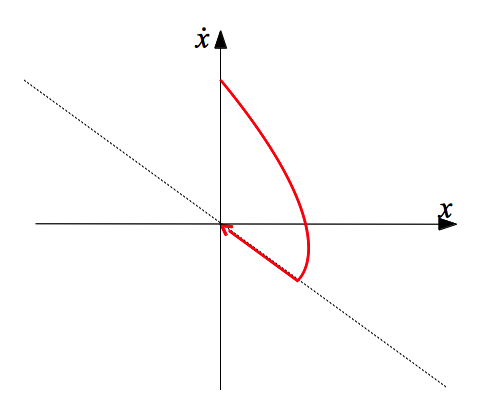
任意の初期値から開始してもスライディングモード超平面 (2次の場合は直線) に拘束され,原点 (目標点) へと収束します.システムに不確かさが存在した場合にもスライディングモードに拘束している限り原点に収束するという特徴を持ちます.
参考文献
- 梅本 和希, 池田 拓也, 松野 文俊, ``スライディングモード制御によるマルチロータ型UAVのロバスト追従制御'', 計測自動制御学会論文集, Vol. 50, No. 2 (印刷中)