トップ > 医療ロボット
医療ロボット
医療手術の多くは,複雑で繊細であるため困難ですがとても重要です.本研究では,手術をより簡単で直感的に行うことを目的としています.そこで,要求されたタスクを制約の中で達成するために,革新的な運動学を用いた新しい医療手術マニピュレータの設計を行っています.さらに,医療手術のパフォーマンスを向上させるための,直観的な触覚フィードバックついての研究も行っています.
RCM
平面RCM機構の限界
提案するRCM機構
最適設計
遠隔操作機構の設計
MIS
MIS(Minimally Invasive
Surgery)は,外科医が切開部と呼ばれる小さな穴を通して患者の体内に細長い手術器具を挿入する外科技術です.血液損失が少なく,術後の回復が速いため,コストの面でも有効です.開腹手術に比べて複数の利点があるため,MISは広く使用されています.
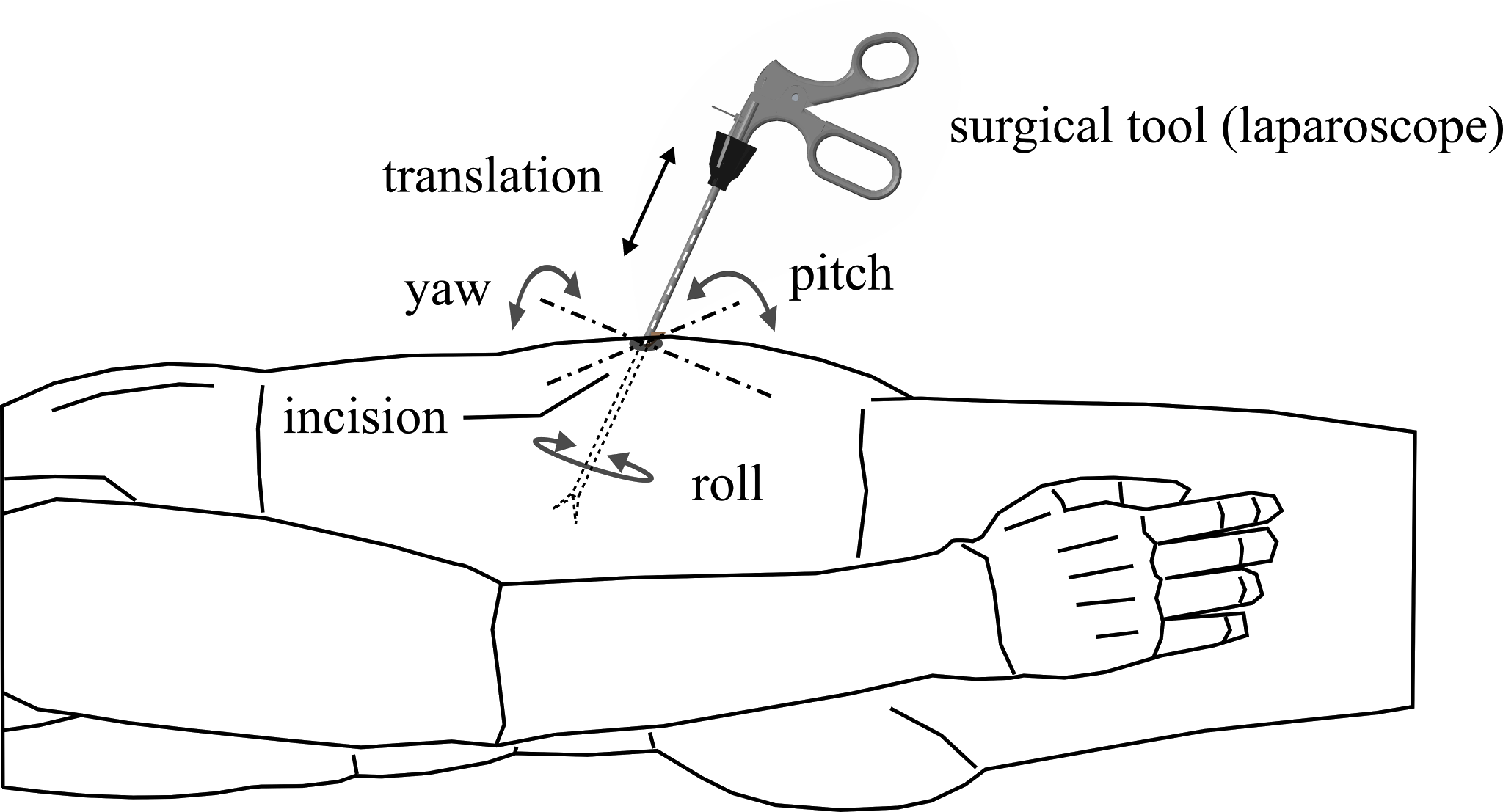
外科医は,患者の体外から器具を操作する必要があり,様々な外科手術を行うためにこれらの器具の正確に制御するのは容易ではありません.
RCM
RCM(Remote Center of Motion)は,機構(または機構の一部)が回転するポイントとして定義されます.ロボット支援外科手術では,切開点は手術マニピュレータの遠隔の中心となります.
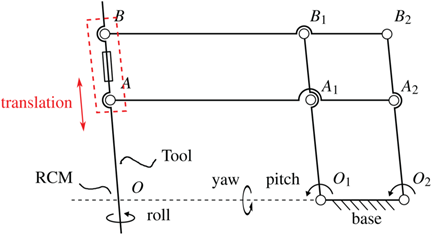
平面RCM機構の限界
図は,二重平行四辺形RCM機構と呼ばれる典型的なRCM機構を示します.しかし,それはピッチ自由度を提供するだけであり,並進などの別の自由度は,遠位端に直接取り付けられたケーブルプーリーまたはアクチュエータなどの外部の手段を用いて別々に達成されます.しかしこのような外部手段を使用は,マニピュレータの性能に悪影響を及ぼします.
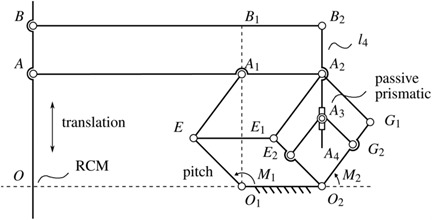
提案するRCM機構
1自由平面RCM機構の限界を克服するために,ピッチと並進を持ち合わせた新しいRCM機構を提案しました.これまでの平面機構とは異なり,提案された設計は変換のための外部手段を必要としません.これにより,コンパクトな遠位端およびより高い操作性能を実現することができます.
 [/en]
[/en]
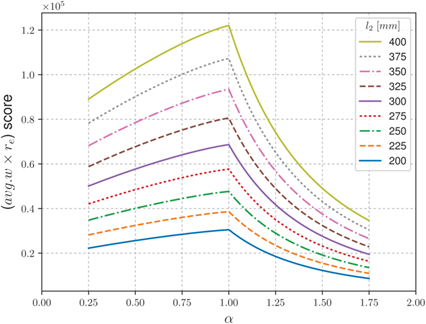
運動性能向上に向けた設計最適化
より良い結果を得るために,MISのための最良のフォームを見つけることが重要です.この最適化は,手術マニピュレータの最小可能サイズで最大運動学的性能を提供する設計候補を決定することを目的としています. 提案された設計の"Average manipulability"(平均可操作性)および"tool translation"を評価指標として使用します.
提案する機構
図は,提案する機構が持ち得るフォームを示しています.3つのフォームは同じ機能を有するが,リンク長比がそれぞれ異なるため,異なる運動学的性能を有します.
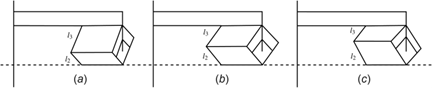
最適設計
最適化の結果,フォーム(b)において評価指標が最大になることが分かりました. ここで,α= 1,α= l2/l3,l2,l3はリンク長を表します.