【目次】
研究環境
1人1つずつ机とデスクトップPCが与えられます。実験室は3階に1部屋、4階の1部屋あり、3階に学生室があります。


.jpg)
写真左→3F実験室/写真真ん中→4Fモーションキャプチャー部屋/写真右→3F学生室
計算機環境(ハードウェア)
1人1台デスクトップPCが与えられます。ロボット用のノートPCもそれぞれ完備しています。○○PC、○○PC、○○PCなど、充実しています。
.jpg)

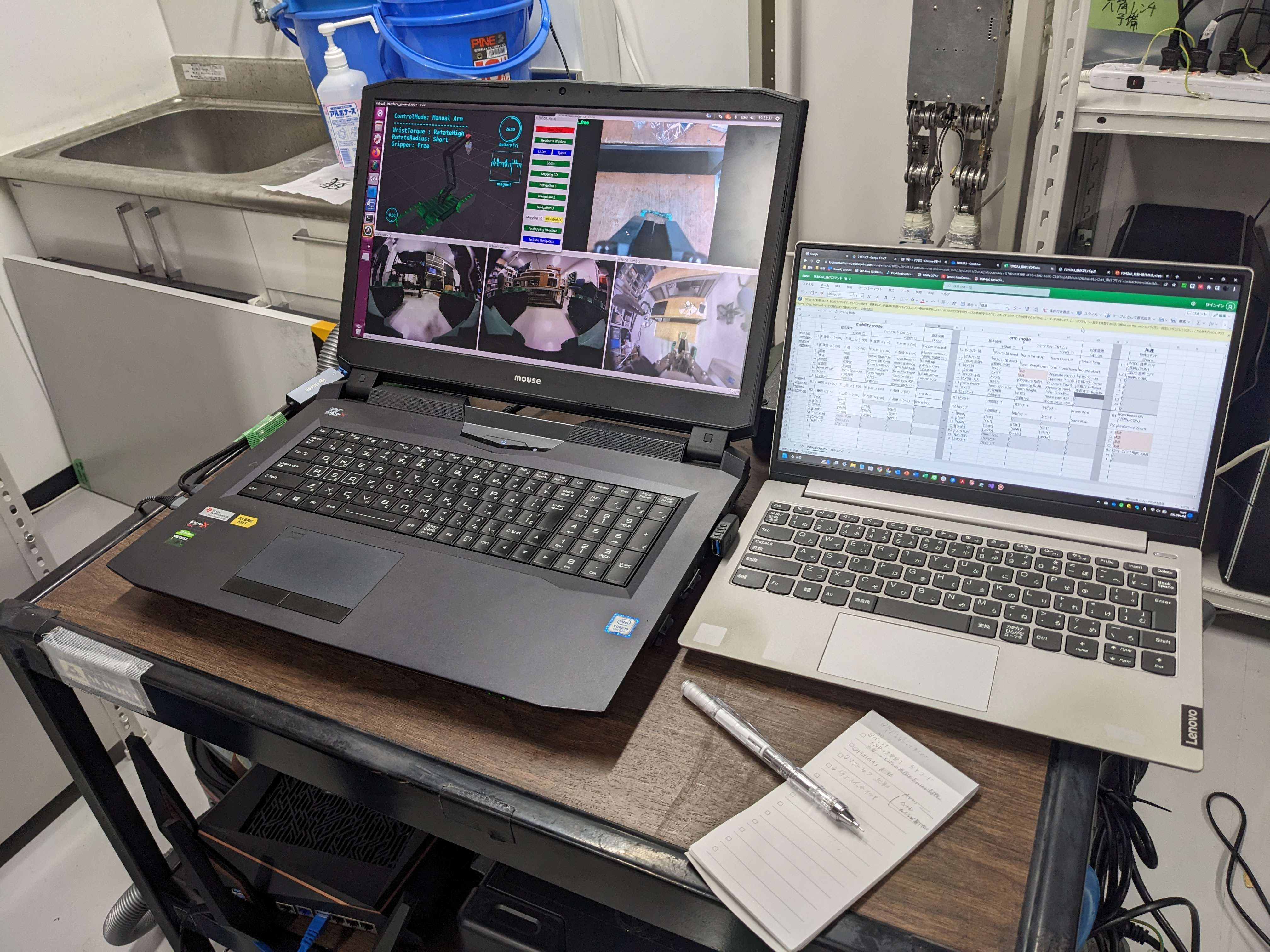
写真左→学生用PC/写真真ん中→ロボット用PC(デスクトップ)/写真右→ロボット用PC(ラップトップ)
研究環境(ソフトウェア)
研究に必要になるソフトウェアはそろっています。新入学生にはロボットを動かすのに必要となるC++の講習を用意しています。
- office
- MATLAB(行列計算、ベクトル演算)
- Inventor(CAD)
- SCRYU/tetra(CFD)
- Visual Studio(ソフトウェア開発)
- HALCON(画像処理)
工作機械
研究室には、様々な工作機器を揃えています。簡単なロボットの政策なら研究室内で製作することができます。
.jpg)
.jpg)
.jpg)
写真左→クリエイター4S(熱溶解積層法3Dプリンタ)/写真真ん中→Form 3+(光造形3Dプリンタ)/写真右→Mark Two(材料押出法3Dプリンタ)

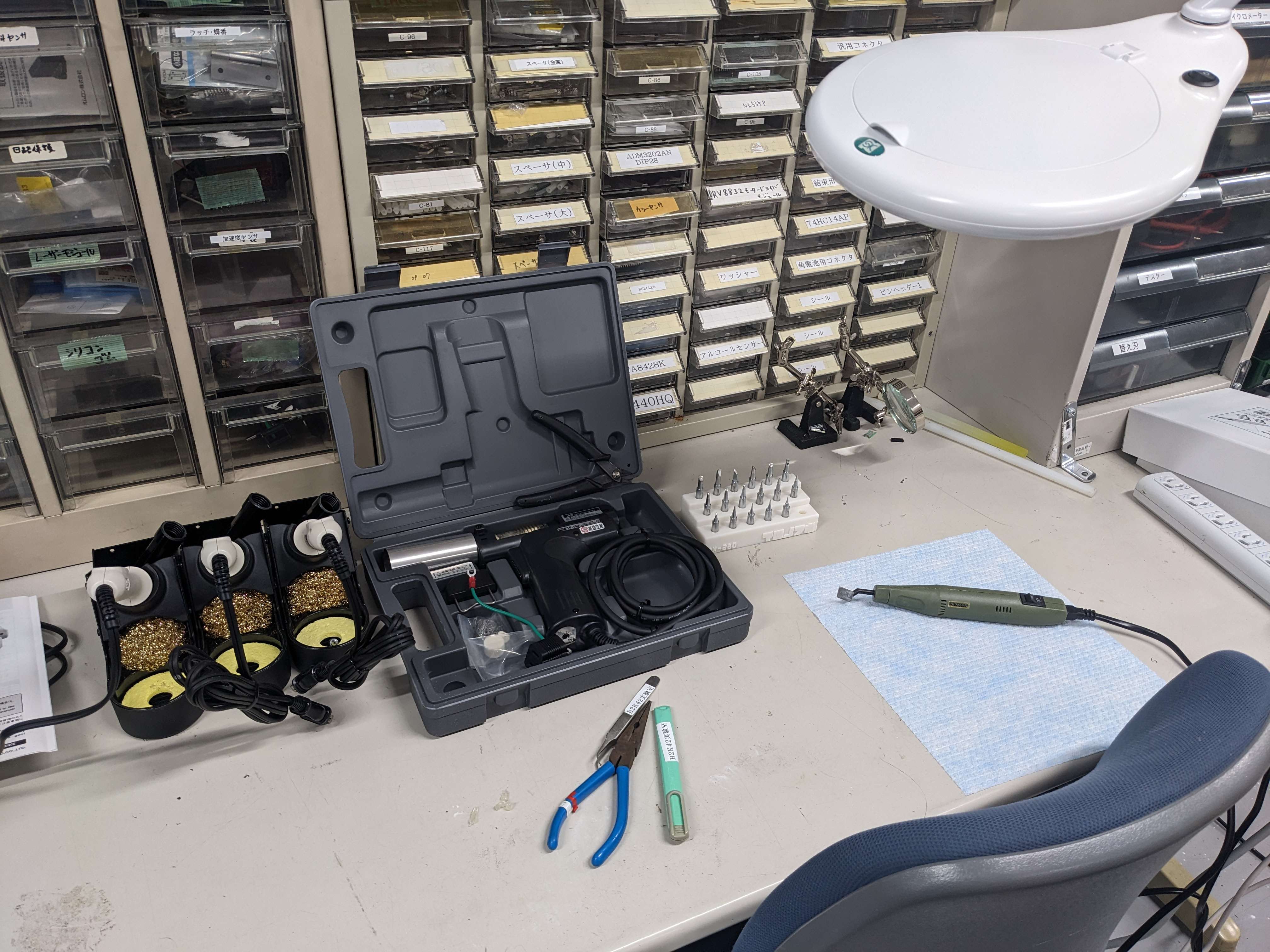

写真左→(左から)ボール盤(大)、糸のこ盤、ボール盤(小)/写真真ん中→はんだセット/写真右→卓上型引張圧縮試験機
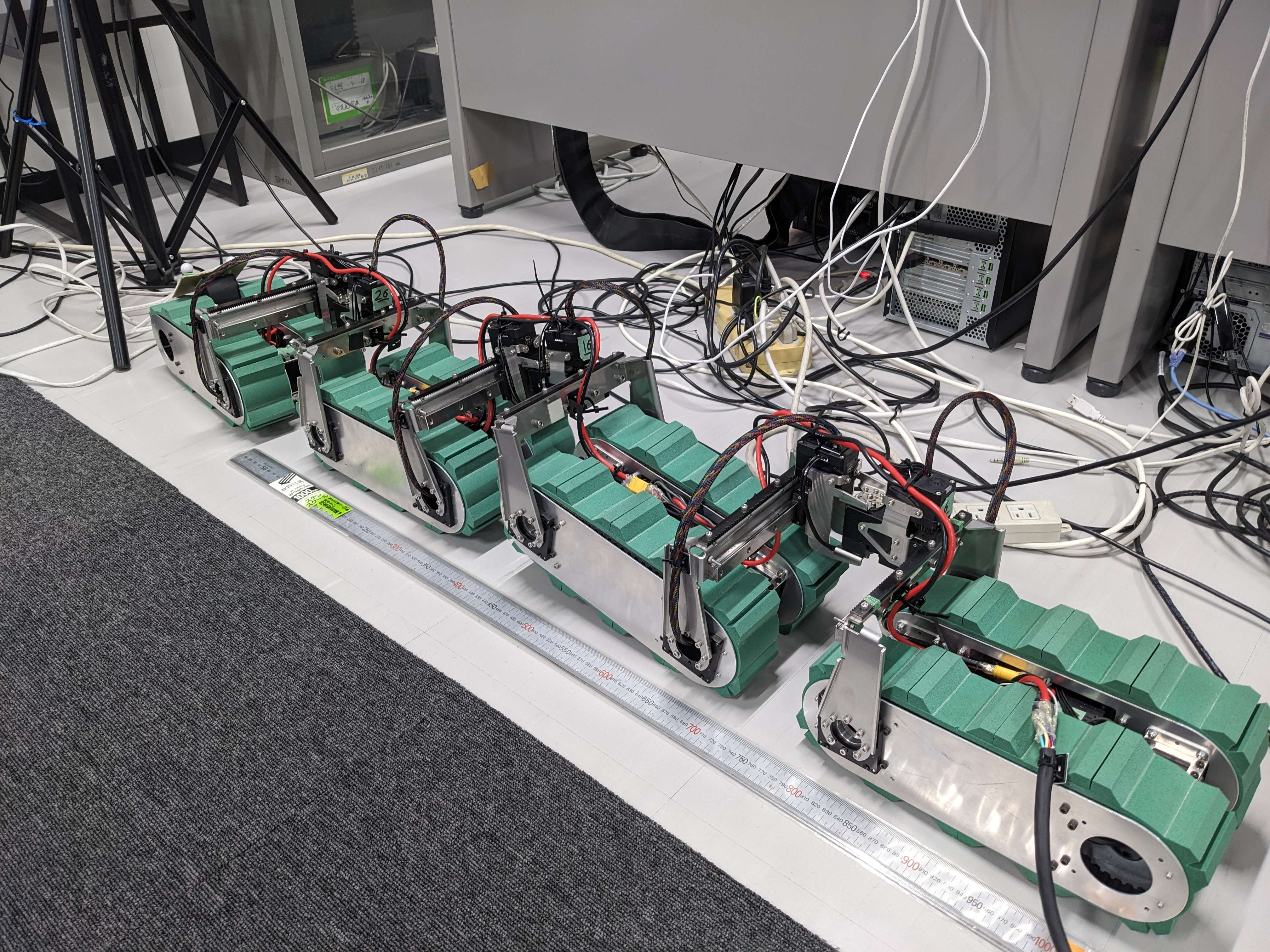
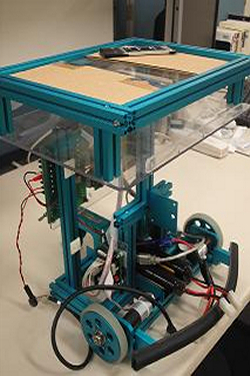
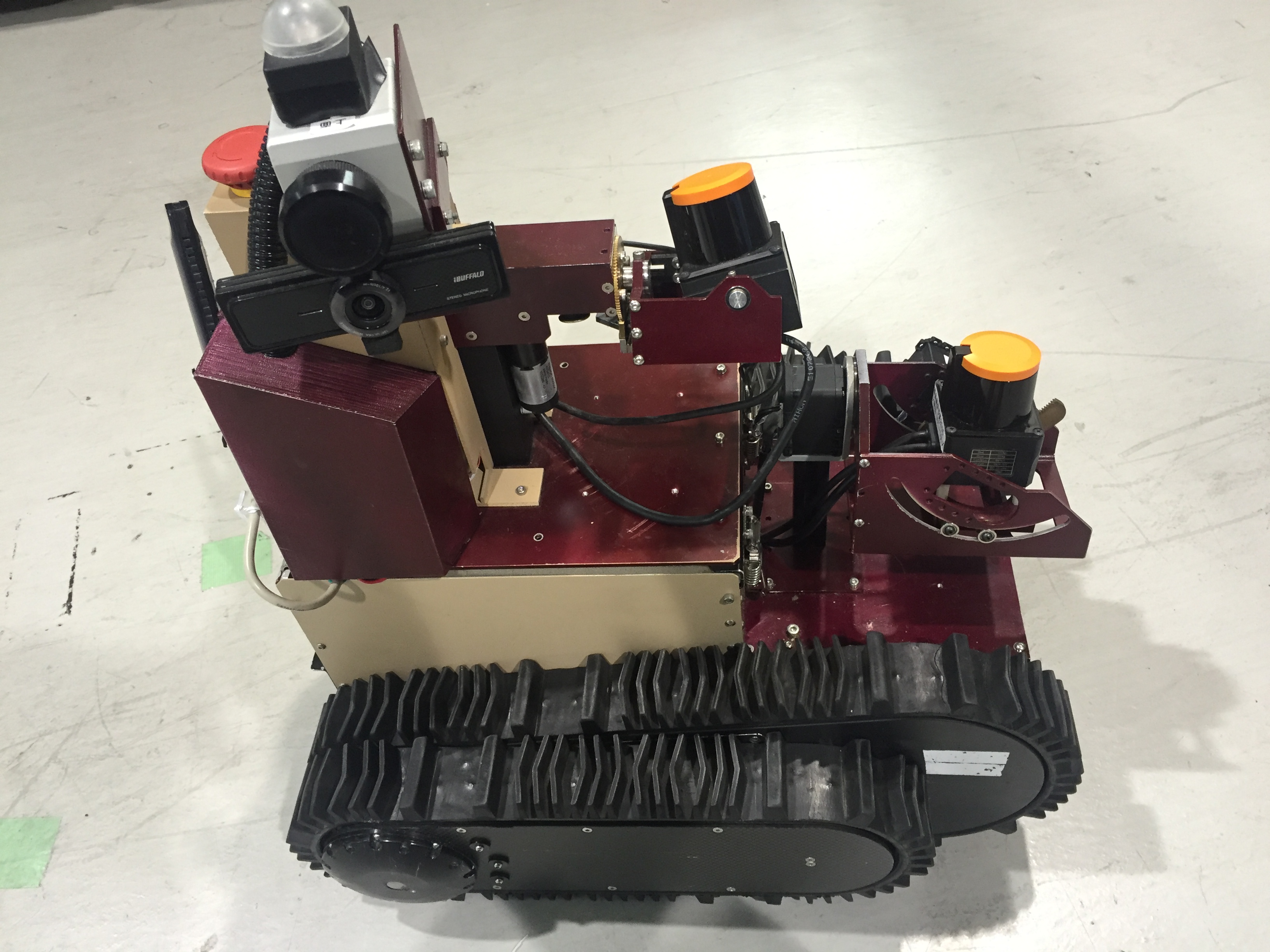
研究用のロボット
松野研究室には,研究対象となるロボットが多くあります.これらのロボットを「より生物に近く」「より高知能に」「より効率的に」制御する研究を行っています.また,これらのロボットのいくつかは学生のアイデアで生まれたものもあります.是非,自らの手で作って制御してみたいアイデアがある人はお待ちしています.
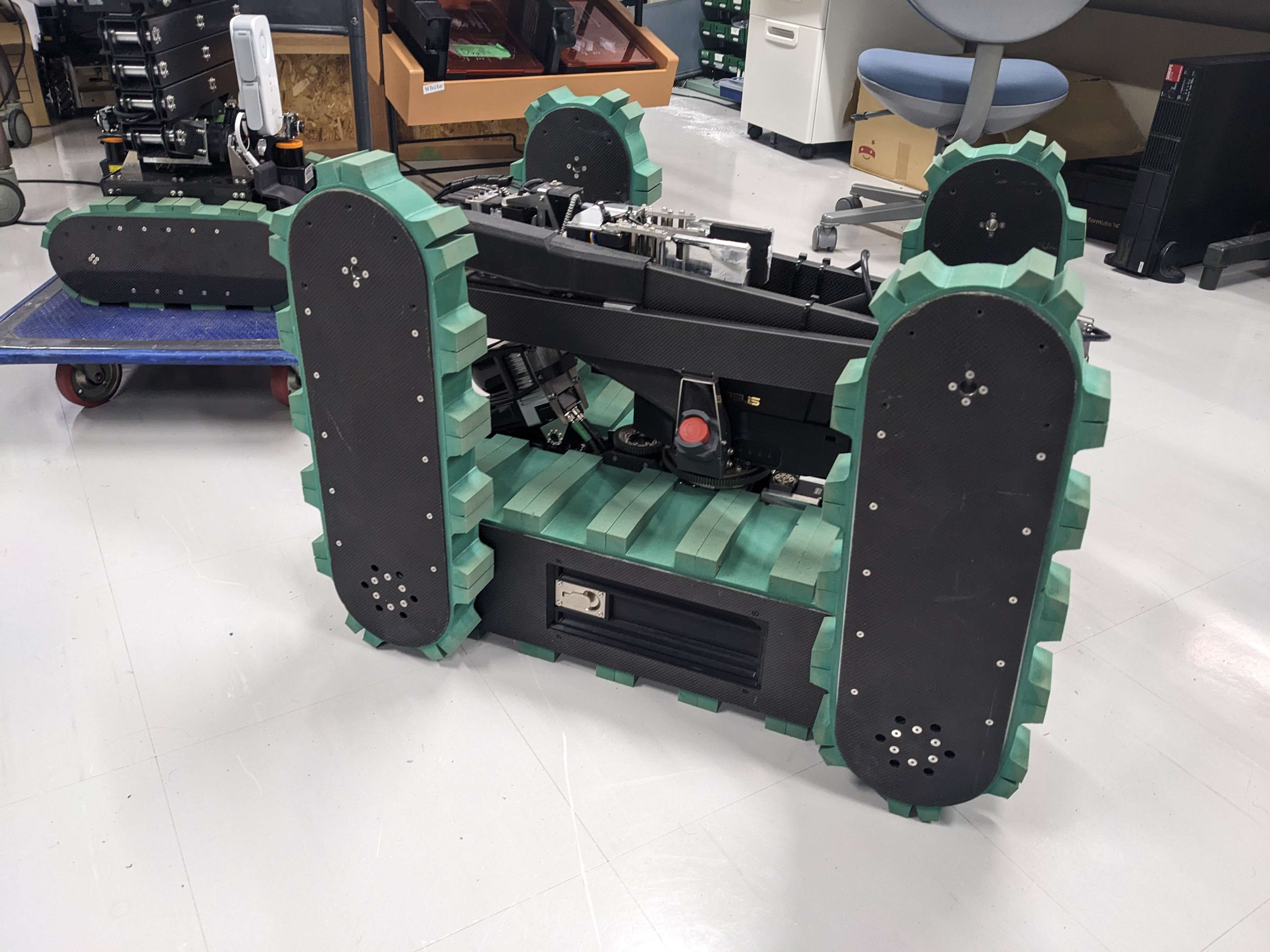

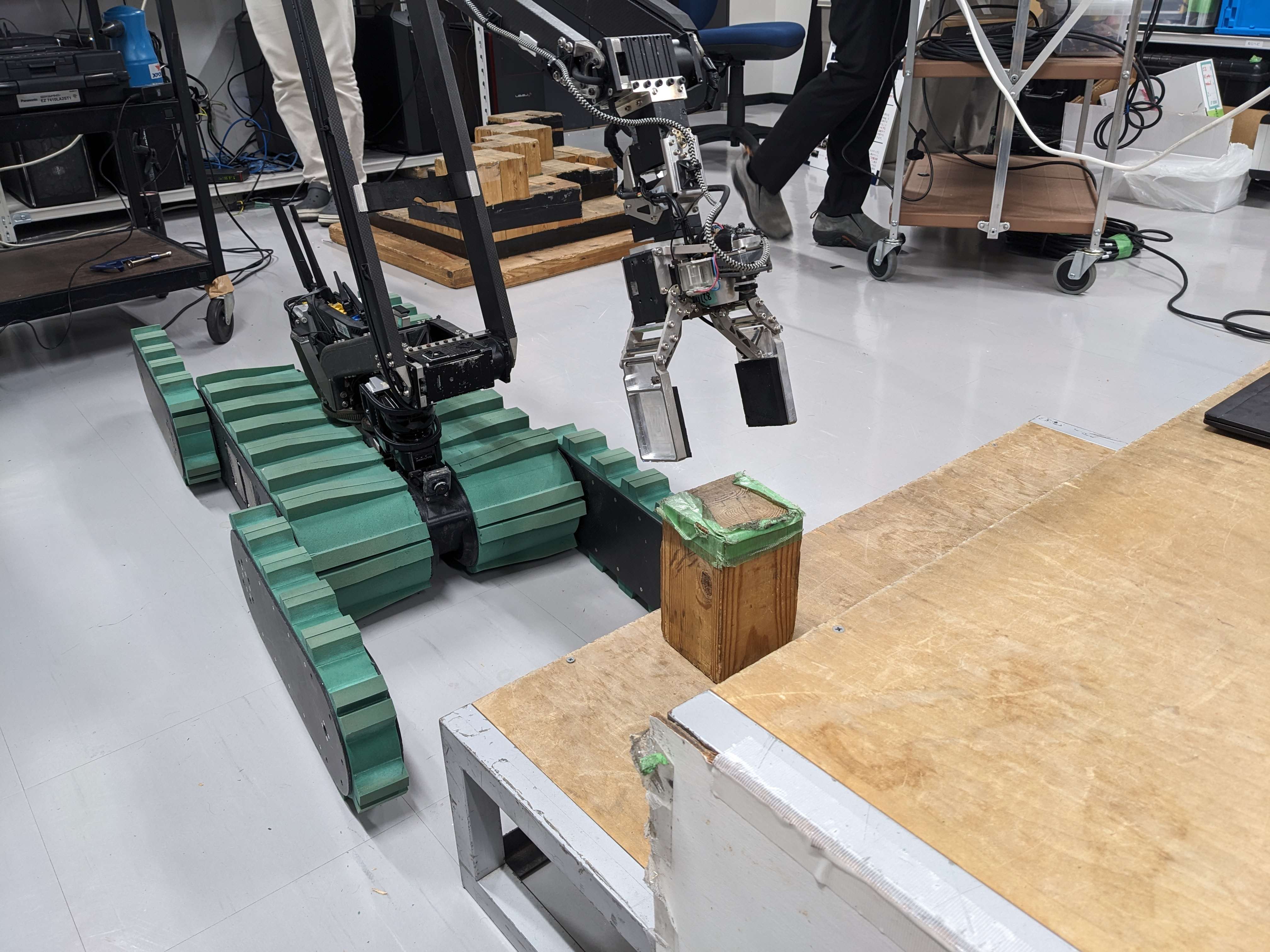
写真→FUHGA3

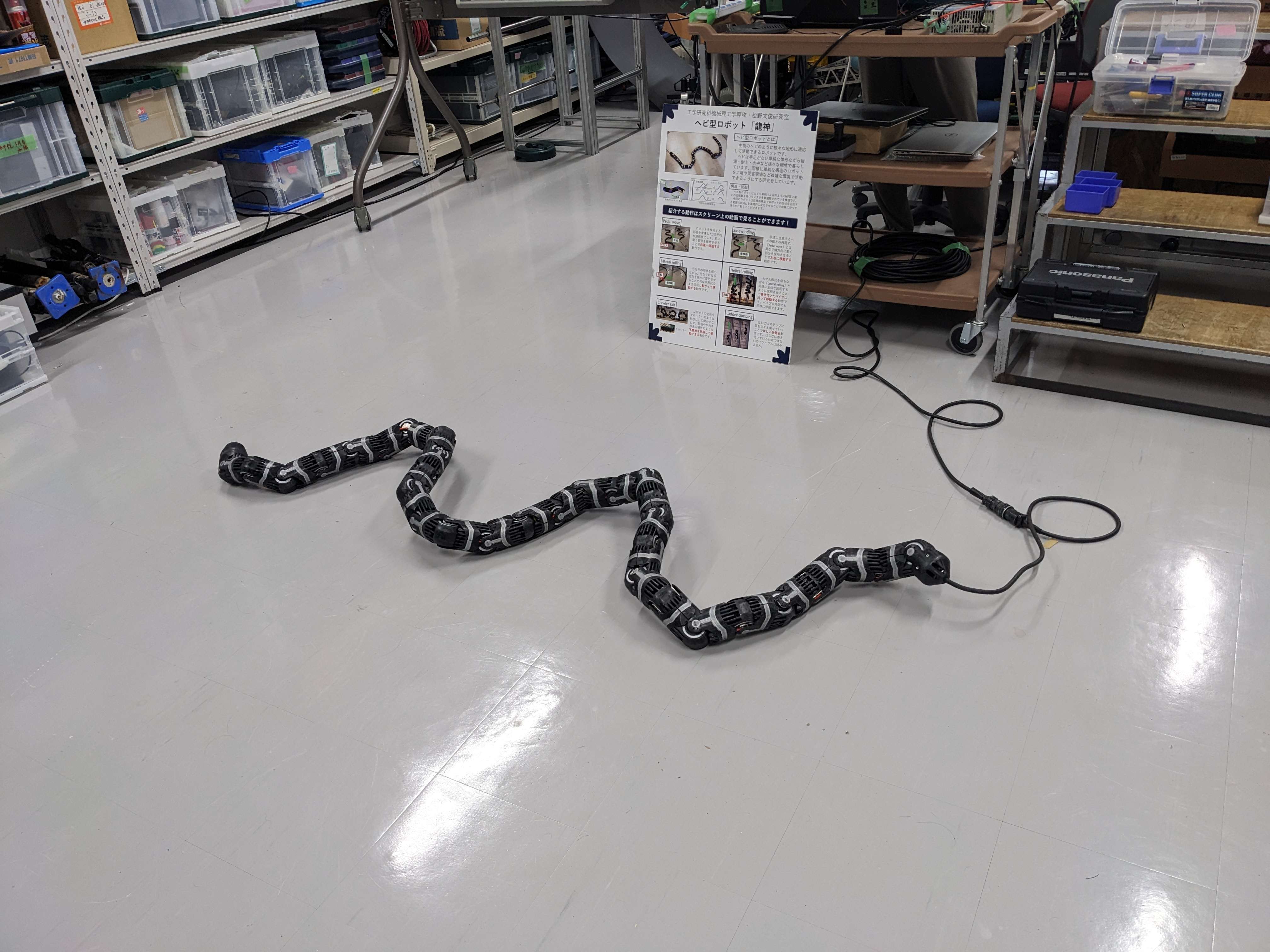
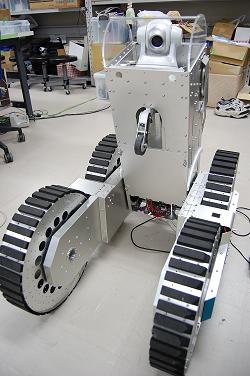
写真左→YAGURA/写真真ん中→RYUJIN/写真右→SUPER KOHGA
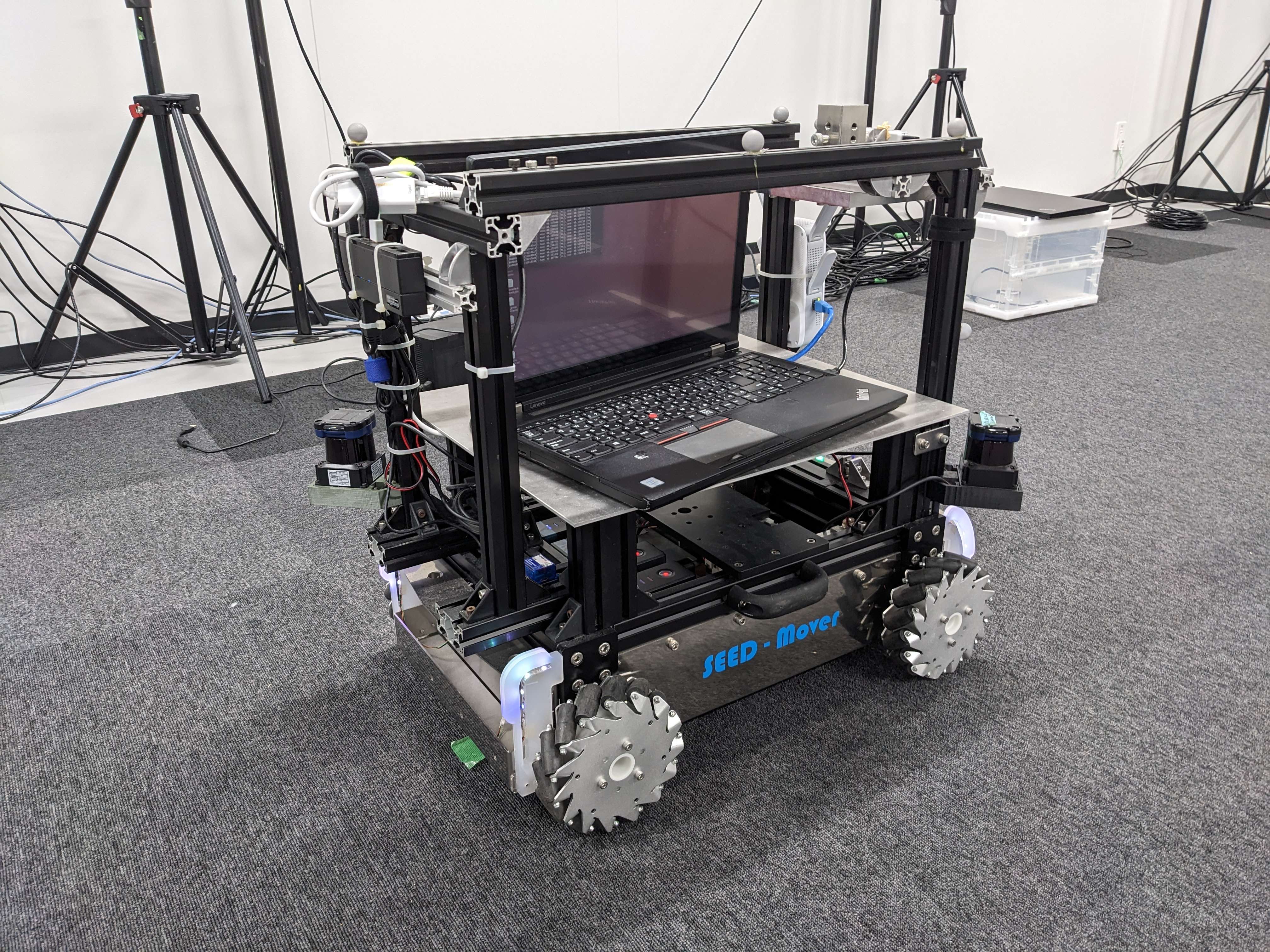
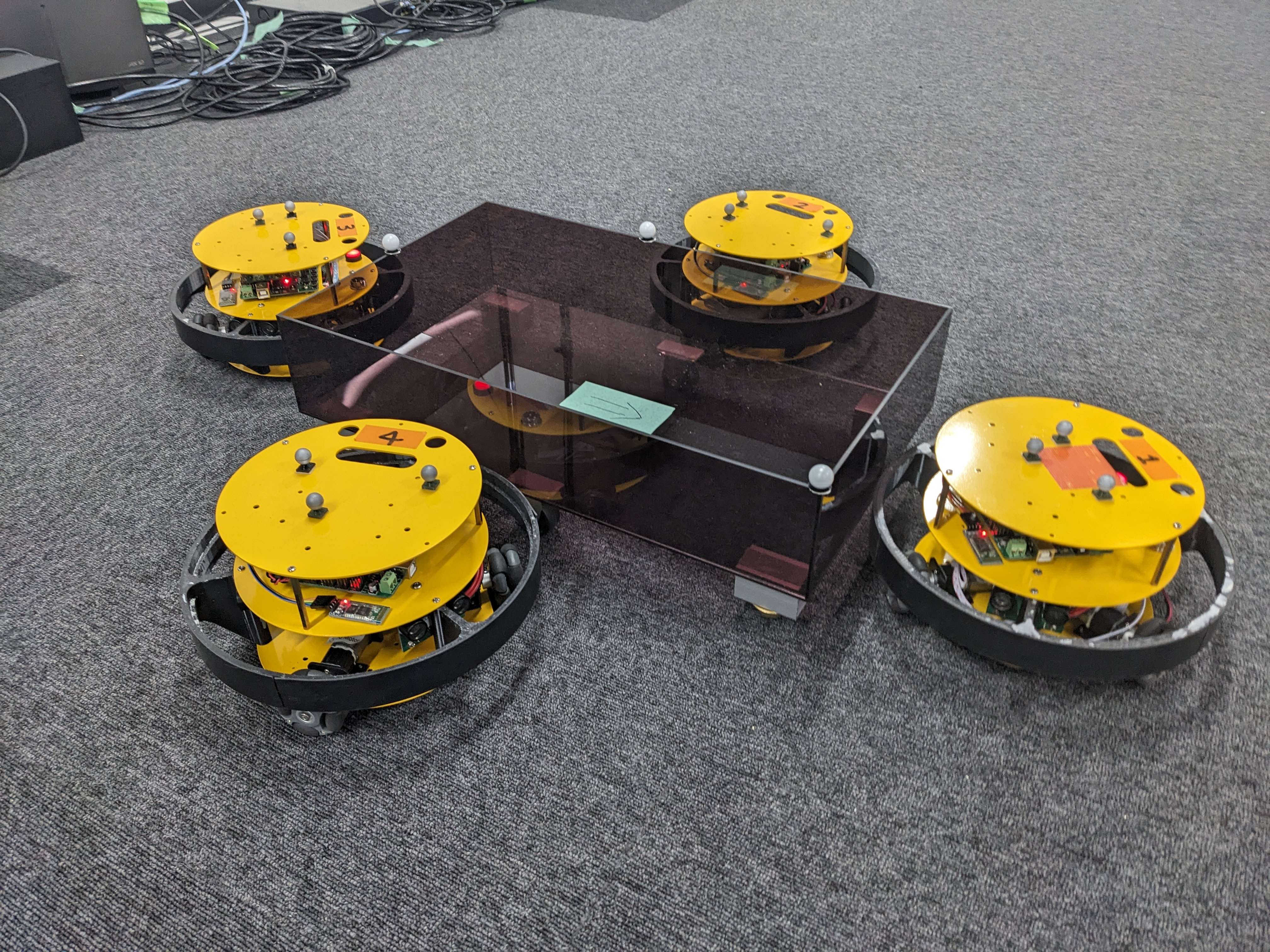

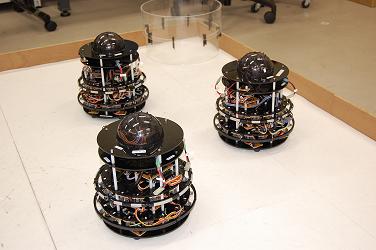
写真左→全方位移動自律ロボット/写真真ん中、右→群ロボット
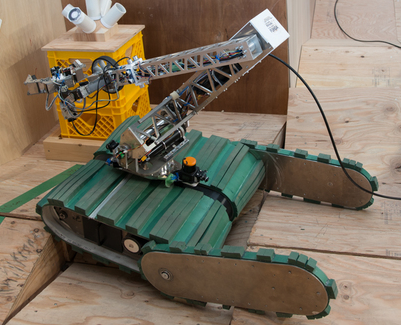

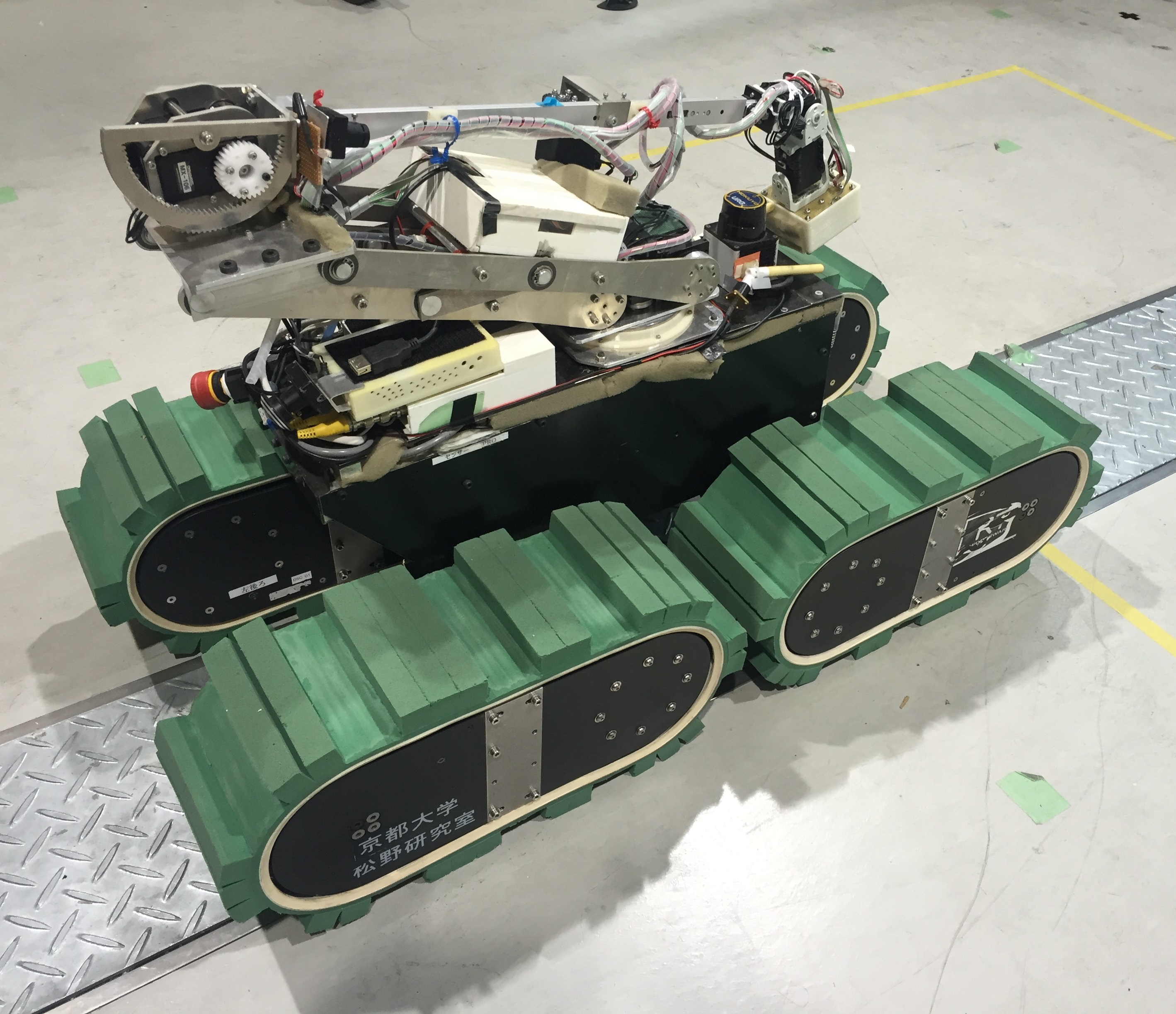
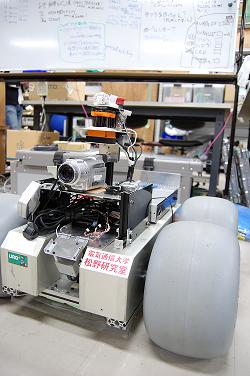
写真左→FUHGA/写真真ん中→ImPACT-Snake MiddlePowerType/写真右→KOHGA3
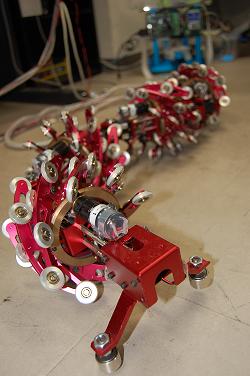
写真最左→ネジヘビ/写真左→beego/写真真ん中→FUMA/写真右→HANZO
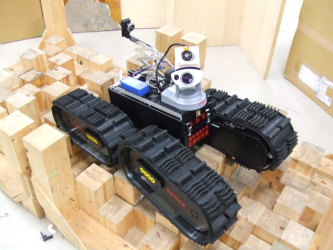
写真左→KOHGA2/写真真ん中→Gecko/写真右→KAMUI
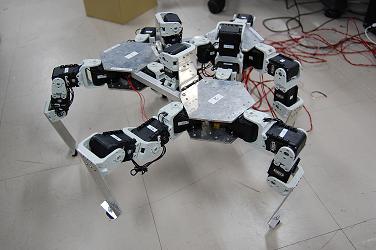
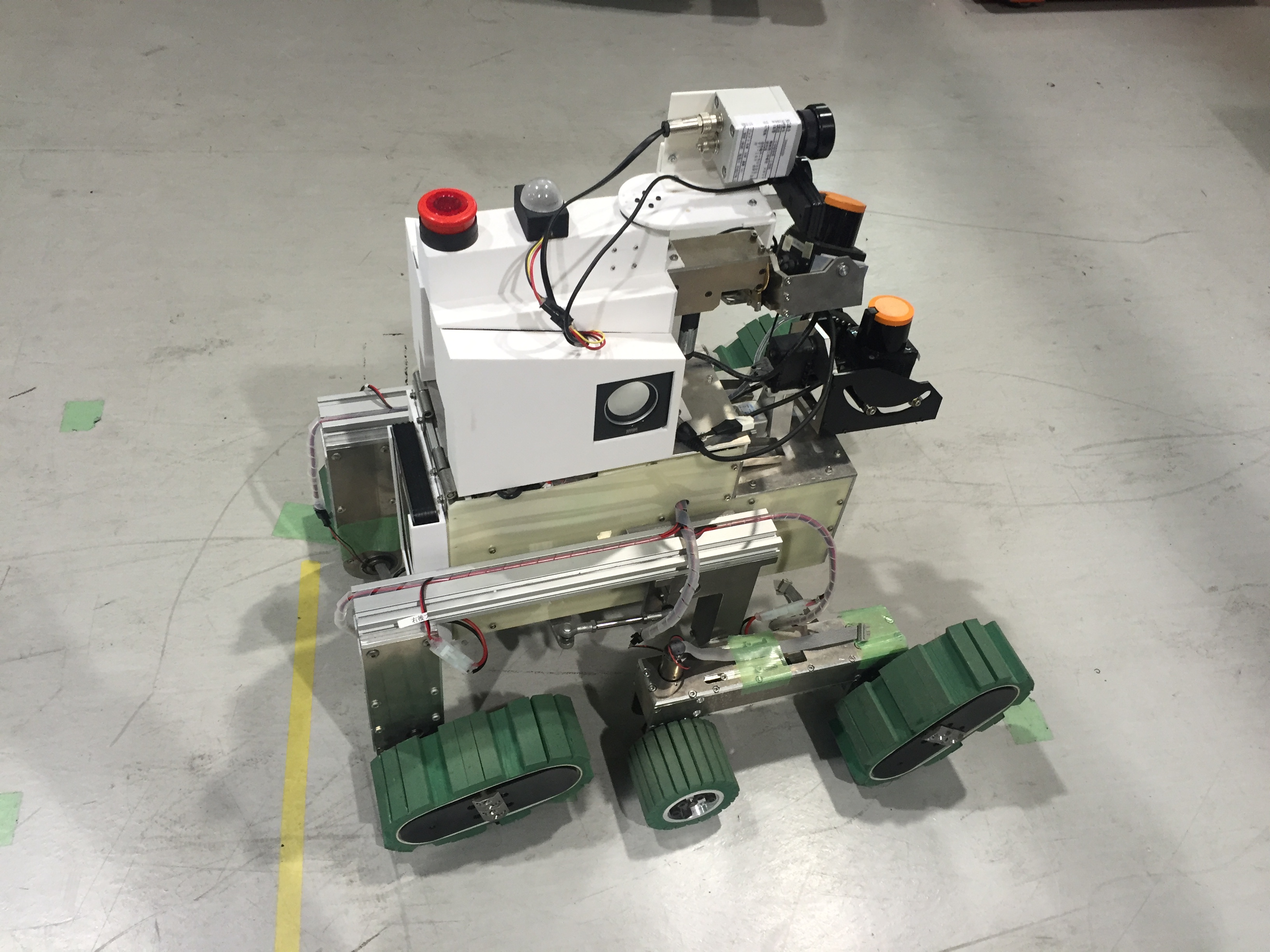
写真左→ASHIGARU(足軽)//写真右→ARGOS