
ロボット工学ならではの視点で
新たな発想をもたらす
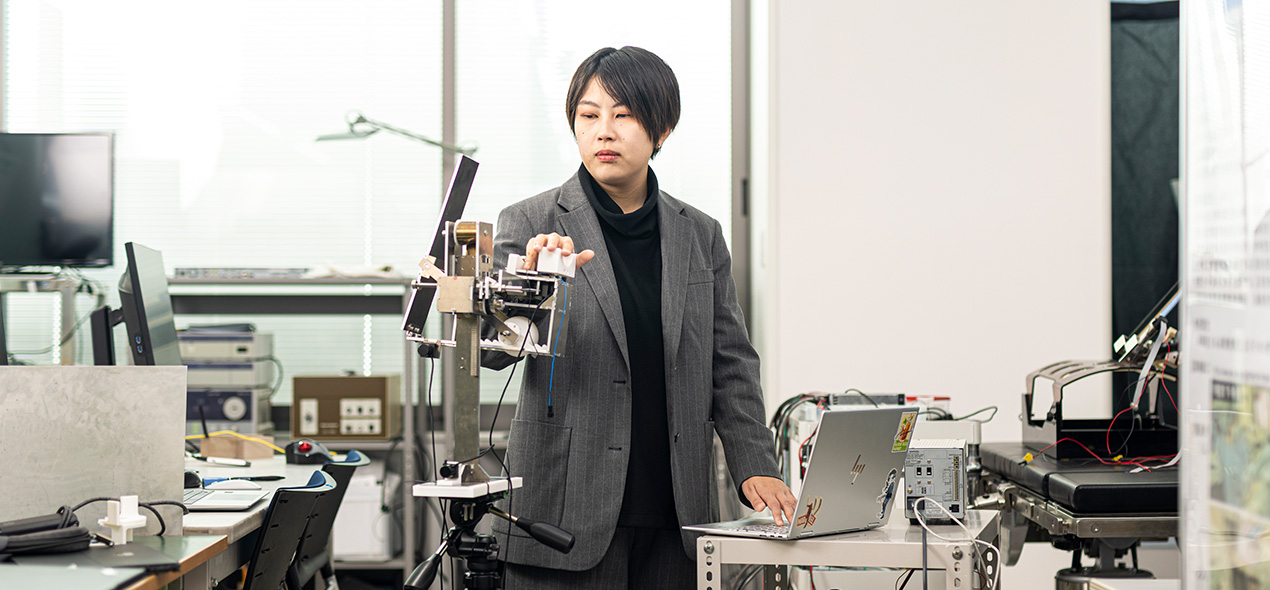
ロボット工学科では、ロボットに関する幅広い分野を実践的に学んでいきます。徐々に知識を広げていくなかで、自分の得意・不得意を理解し、本当にやりたいことを見つけることができました。現在所属している医療ロボティクス研究室は、それまでに学んだ様々な知識を存分に生かせる環境であると考えて選びました。現在、私は前腕で操作する「3軸操作デバイス」の研究を行っています。近年、腹腔鏡を用いた外科手術が普及していますが、助手が臓器を把持するために長時間鉗子※を保持し続けなければいけません。そのため、手の振戦(ふるえ)が起こり、手術の精度に影響を与えるリスクがあります。医師の方と直接お話しした際に、こうした手術環境を知り、医師を補助する操作デバイスの必要性を実感。私が研究している3軸操作デバイスは助手の代わりに鉗子を保持する技術であり、実際に医療現場に実装されれば、医師の負担を軽減し手術の安全性がさらに向上すると考えています。
ロボットについては、学部時代に所属していた「ロボットプロジェクト」の活動を通しても知識を深めました。2年生の春にはチームのリーダーを務め、NHK学生ロボコンの全国大会を目指して活動。個人の活動状況を共有し、目標を明確にすることで、メンバーの連携を強化することができました。この経験を通して、リーダーシップやコミュニケーション能力を身につけることができたと感じています。
内定先の企業では、スマート農業などの分野でロボット工学の知識を活かしていきたいと考えています。また、研究活動で培った多角的な視点を活かし、ロボット工学科出身ならではのアイデアや発想で、社会に貢献できるエンジニアになりたいです。
※はさみに似た形状をした金属性の医療器具。器官や組織などを挟み、牽引したり圧迫したりする際に用いる。



