





工学部 機械工学科 知能ロボティクス研究室
牛田 俊Ushida Shun
教授
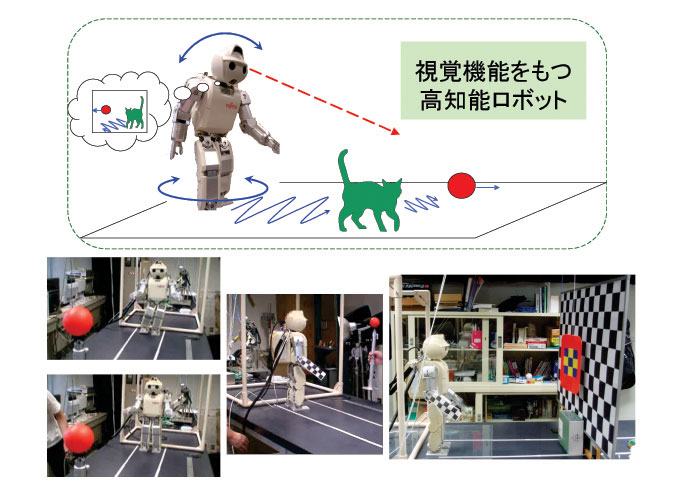
人は様々な感覚情報を使って自身の筋骨格系を巧みに制御することができます。本研究室では、人の脳に備わっている学習・記憶・適応という高度な機能を参考にして、「人間のように賢く動くロボット」の研究を行っております。具体的には、周りの状況を目(カメラ)で把握して賢い動きができる人型ロボット、手先で棒のバランスをとるロボットアーム、倒れずに走る二輪ロボット等の設計製作の技術を修得し、ロボットの運動制御系の高知能化を実現します。これらの人工機械をどのように創りどうやって制御するのかということを考え、これまでの制御工学、ロボット工学の基盤技術を駆使して「現実のロボットに役立つ新しい制御理論」を確立します。
Theme 主な研究テーマ
- 人の運動制御を模擬した高知能ロボットの制御に関する研究
- 視覚をもつ二足歩行ロボットの運動制御に関する研究
- 車輪型倒立振子のロバスト安定化制御器設計に関する研究
- 小型無人ヘリコプタの飛行特性の同定とオートパイロットシステムの開発
- レンズ加工機の振動抑制、各種性能向上に関する研究
Profile 教員プロフィール
牛田 俊Ushida Shun教授
専門分野
- 制御工学
- ロボット工学