





情報科学部 情報知能学科 神経模倣システム研究室
奥野 弘嗣Okuno Hirotugu
教授
当研究室には、二つの目標があります。一つ目の目標は、生体の神経系に学んだ効率の良いセンシング・制御システムを開発することです。高性能なコンピュータを使っても困難な外界情報の理解を、生体の神経系は難なく行い、自然界を生き抜いています。この様な神経系の長所を模倣することは、自律的に活動できるロボットの実現に向けた有効な手段です。二つ目の目標は、生体の神経系における情報処理の原理を解明することです。神経系の利点を生かしたシステム作りをするためには、まずこの原理を解明しなくてはなりません。神経系を理解すること、そしてそれに学んでロボットを作ること、この2点が当研究室の研究の柱となります。
Theme 主な研究テーマ
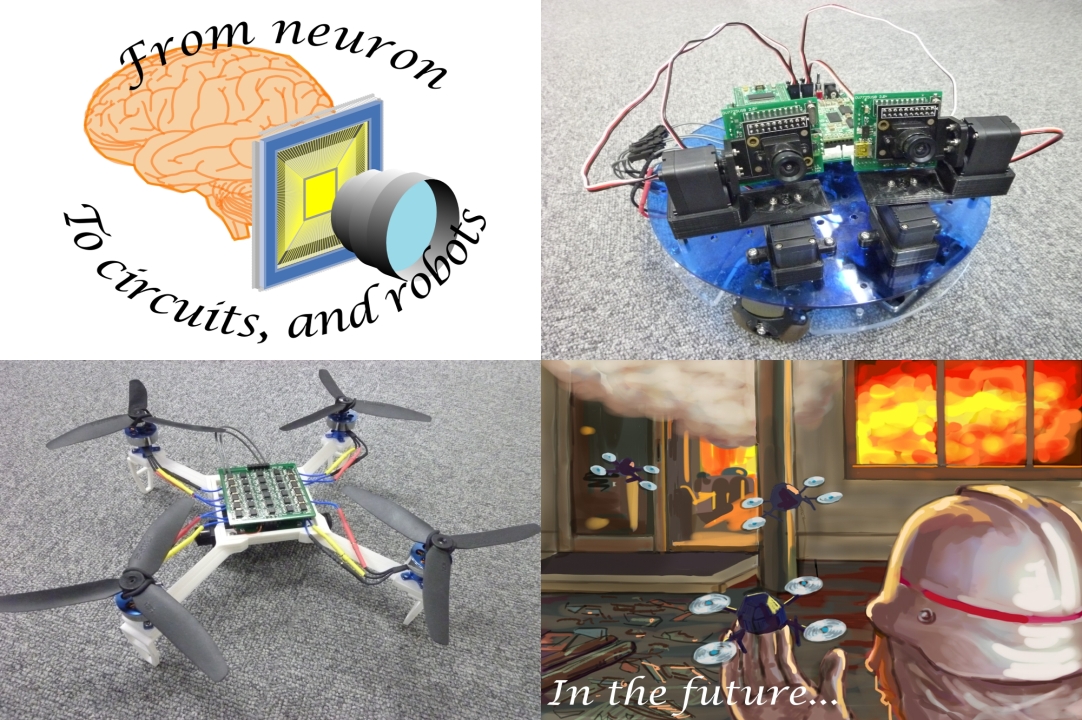
- 生体視覚に学んだ小型ロボットの視覚制御
- 両眼視ロボットを活用した動的環境における視覚神経系シミュレーション
Profile 教員プロフィール
奥野 弘嗣Okuno Hirotugu教授
専門分野
- 電子工学
- 神経科学
Message from the Faculty 教員メッセージ
当研究室は、コンピュータ科学と神経科学を融合させた全く新しい分野の研究を行っています。当研究室に配属された学生は、コンピュータや電子回路の動作原理を学び、神経の計算原理を学んで、電子回路と神経回路のいいとこ取りをした「神経模倣システム」の開発を行います。実際に動き、社会に役立つ先進的なモノづくりを楽しんでいるうちに、いつの間にか最先端の技術・知識を身につけたエンジニアになっている・・・、当研究室はそんな環境づくりを目指しています。
Future この研究がかなえる未来
当研究室の研究の先には、生き物のように自ら周囲を理解し、様々な環境で自律的に活動できるロボットの実現があります。このようなロボットは、ヒトの活動を大いに支援することができます。例えば、現在取り組んでいる研究では、昆虫の神経系に学んだ小型自律飛行ロボットの開発を行っています。これが完成すれば、人が容易に立ち入れないような災害現場等での活躍が期待できます。当研究室は、電子回路と神経回路のいいとこ取りをした「神経模倣システム」で、よりよい社会をきり拓いて参ります。