






●谷口先生が持っているものは何ですか?
研究室で開発しているロボット「形状記憶合金とトグル機構を活用した跳躍型月探査機」です。
●月の探査ですか?
私たちは月面を探査するロボットの研究を2017年からスタートさせました。きっかけは、小型人工衛星「まいど1号」を2009年に打ち上げた東大阪市の「宇宙開発協同組合SOHLA(ソーラ)」から、新たに作るロボットの共同研究に誘われたことでした。私たちが形状記憶合金を使った機構の開発を担当し、月面跳躍移動ロボット「まいど2号」が誕生しました。2025年日本国際博覧会(大阪・関西万博)にも展示されました(写真1)。
「まいど2号」とは別に、同じ機構を用いて研究室のオリジナルロボットも開発しています。現在は2種類を製作中です(写真2、図1・2)。
-
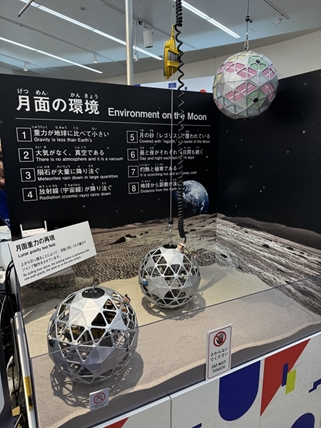
(写真1)大阪・関西万博に展示された「まいど2号」
-
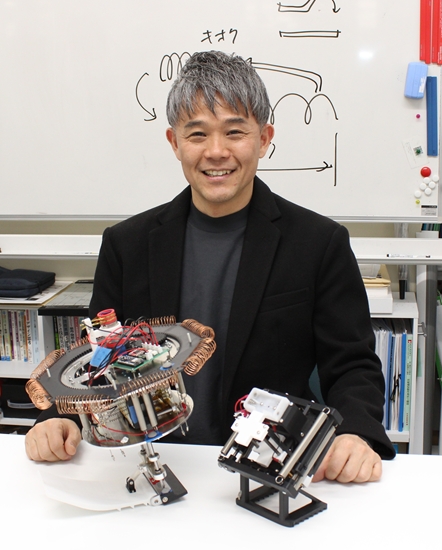
(写真2)研究室で開発している「任意方向へ転換できる月溶岩洞窟探査機」(左)と「砂をかいて跳躍する小型月面探査機」
-

(図1)任意方向へ転換できる月溶岩洞窟探査機 -
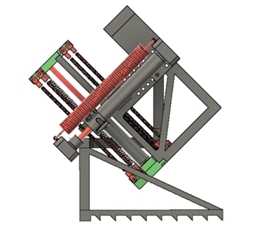
(図2)砂をかいて跳躍する小型月面探査機
●なぜ、形状記憶合金を使ったのですか?
形状記憶合金は「小さくて軽いのに、大きな力を発生させることができる」からです。地球から月への輸送費は100gで1000万円ともいわれており、軽さを意識した開発が求められます。また、「熱で動作する」という性質があるので、月の温度環境を利用して動かせる可能性もあることからアクチュエータとして利用しました。
●アクチュエータとは、どのようなものですか?
アクチュエータはエネルギーを機械的な運動に変換する装置のことです。身近な場所でアクチュエータはたくさん使われています。例えば、電動モーターです。電気が流れるとモーターが動き、タイヤなどを回転させることができます。人間の筋肉もアクチュエータと考えることができます。食べ物から作ったエネルギーで筋肉を動かします。今回の月探査ロボットでは、形状記憶合金の熱エネルギーによる収縮を駆動源として利用しています(図3)。
-
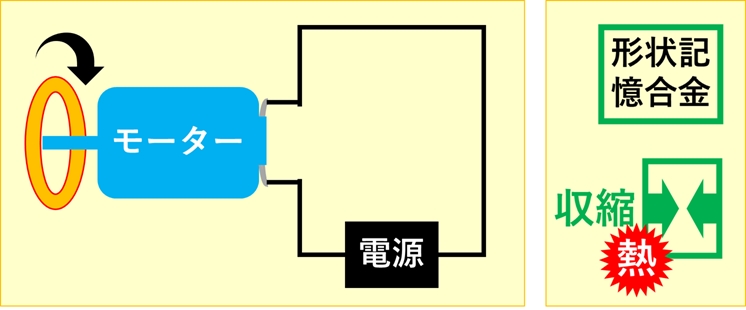
(図3)㊧電動モーターは電気エネルギーを回転エネルギーに変換する㊨月探査ロボットでは、形状記憶合金の熱エネルギーによる収縮を駆動源とした
●探査機の名称には「トグル機構」という言葉も入っています。トグル機構とはどのようなものですか?
トグル機構は力を増幅させることのできる仕組みです。2本のリンク(平たい棒)を結合させ、一方の端を固定、もう一方はスライドできる状態にしておき、曲げた状態から伸ばしていきます。真っすぐになるほど、大きな力を生み出すことができます(図4)。
形状記憶合金のアクチュエータの力をトグル機構で増やしてやることにより、強いばねを動作させ、ばねによる跳躍を実現しました(図5)。
-
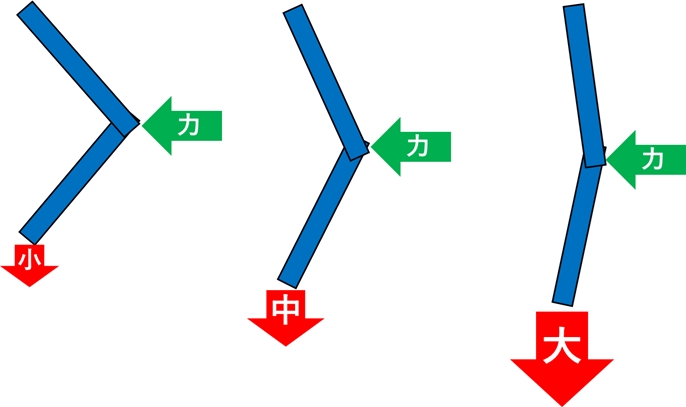
(図4)トグル機構を用いると、力を大きくすることができる -
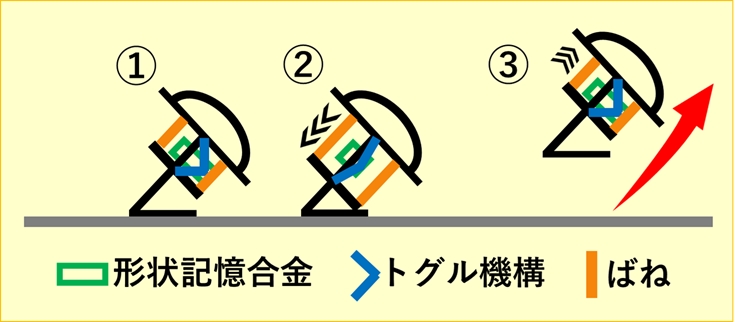
(図5)①最初の状態②形状記憶合金を通電加熱すると、収縮によりトグル機構が伸びてばねが伸長③トグル機構を開放すると、ばねが一気に収縮して跳躍
●開発で難しかったのはどのようなことですか?
当初は形状記憶合金の収縮だけを駆動源に、ばねを動作させようと考えました。ところが、形状記憶合金は収縮していくにつれて力が減少する性質があることがわかりました。一方、ばねは動作するほど元に戻ろうとする反発力が大きくなり、形状記憶合金の力だけで、ばねを動かすことは困難だと分かりました。解決策を模索するなか、力を増幅することのできるトグル機構の利用を思いつきました。構造を工夫して、ばねが跳躍できる仕組みを完成させました。
●いろいろな技術を組み合わせることで可能性が広がるのですね。
研究や開発において、技術的な知識をつなげたり、掛け合わせたりすることが大切です。そのためには、まずは知ることが必要です。学生には、「さまざまな引き出しを持っておくことが大切だよ」と伝えています。
そして実験では、仮説を立てること(結果を予想すること)と、実験結果が示す意味を考えることが大切だと指導しています。予想した結果とならなかった時に「あれ? なぜ?」と考えることが大事なのです。失敗の原因や、目的を達成するためにはどうすればいいかを考え抜くことで、気付きや解決策が見つかるからです。繰り返し挑戦して、諦めずに突き詰めていくことが開発の面白さでもあります。
この月探査ロボットも試行錯誤を繰り返し、機能や形は年々進化しています(写真3)。
-
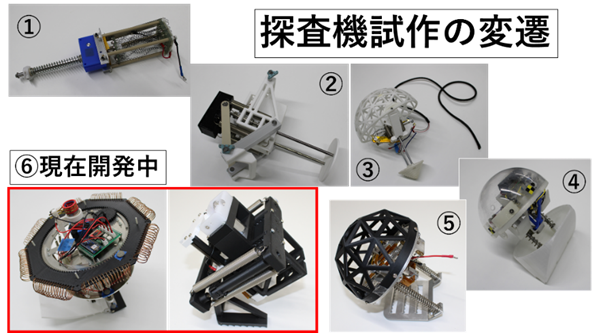
(写真3)2017年にスタートした月探査ロボットの変遷
●谷口先生の専門分野は「ソフトロボティクス」です。日本語にすると「柔らかいロボット工学」。ハードなイメージの強いロボットをソフトから考える理由を教えてください。
人間や生物は、環境に適用しながら柔軟に動き、時には適当に振る舞いながらもなんとなくいい感じで機能します。ロボットにもこのような側面があるといいなぁと思い、ソフトロボティクスの研究をしています。ソフトロボティクスとは、柔軟さを取り入れたロボットに関連する研究です。空気圧や熱で動作する軽くて柔軟なソフトアクチュエータや、柔らかい素材をロボットや装置に用いることで、しなやかな動きを実現し、人などへの接触時の衝撃を緩和させ、さまざまな環境に適応できるようになります。また、柔らかさが加わることで安全性も高まります。
私たちの研究室では月探査ロボットのほか、ソフトアバターロボット、小児用動力義手、関節運動支援装置、アニマルセラピー用ミズクラゲロボット、褥瘡(じょくそう)予防装置などの研究も進めています。
ロボットをソフトに考えるだけでなく、考える側の我々の発想をソフトに(柔軟に)することも大切にしています。
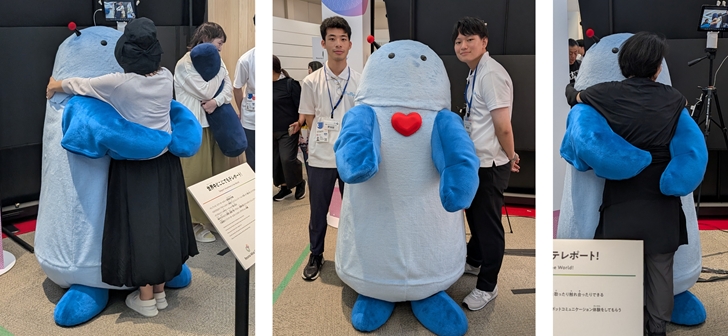
大阪・関西万博では、IT企業「iPresence」と共同開発した遠隔抱きしめロボット「FuAra(フアラ)」も公開。離れている人とハグできる感覚が「未来のコミュニケーション」として好評だった

