







日本には何本くらいの橋りょうがあると思いますか?
現在、人や車が通る道路橋のみで約73万橋もあり、多くが高度経済成長期に建設されたものであるため、その老朽化が大きな社会問題となっています。そして、数が膨大であり、高所作業のリスクや足場の建設コストの問題などから、必ずしも十分な点検が実施されていない現状があります。
近年では、ドローンを使って、目視点検の代替として利用する事例も増えてきました。しかし、常にプロペラを回転させて飛行するドローンは電力の消費が激しく、その飛行時間は20~40分程度であるため、長時間の点検作業には不向きです。また、点検方法はカメラによる撮影に限られ、点検作業員が実施するような板厚の計測など接触を伴う点検はできません。
現在、人や車が通る道路橋のみで約73万橋もあり、多くが高度経済成長期に建設されたものであるため、その老朽化が大きな社会問題となっています。そして、数が膨大であり、高所作業のリスクや足場の建設コストの問題などから、必ずしも十分な点検が実施されていない現状があります。
近年では、ドローンを使って、目視点検の代替として利用する事例も増えてきました。しかし、常にプロペラを回転させて飛行するドローンは電力の消費が激しく、その飛行時間は20~40分程度であるため、長時間の点検作業には不向きです。また、点検方法はカメラによる撮影に限られ、点検作業員が実施するような板厚の計測など接触を伴う点検はできません。
私たち先端モバイルロボティクス研究室では、橋りょうなどのインフラ構造物に多用されているH形鋼などの鋼材に吸着し、プロペラを停止させた状態で点検作業ができるドローン(図1)の開発を進めています。このドローンは鋼材に磁力で吸着することで落下を防止していますが、強力な永久磁石で吸着すると、離脱する際には引き剥がすために大きな力が必要となります。
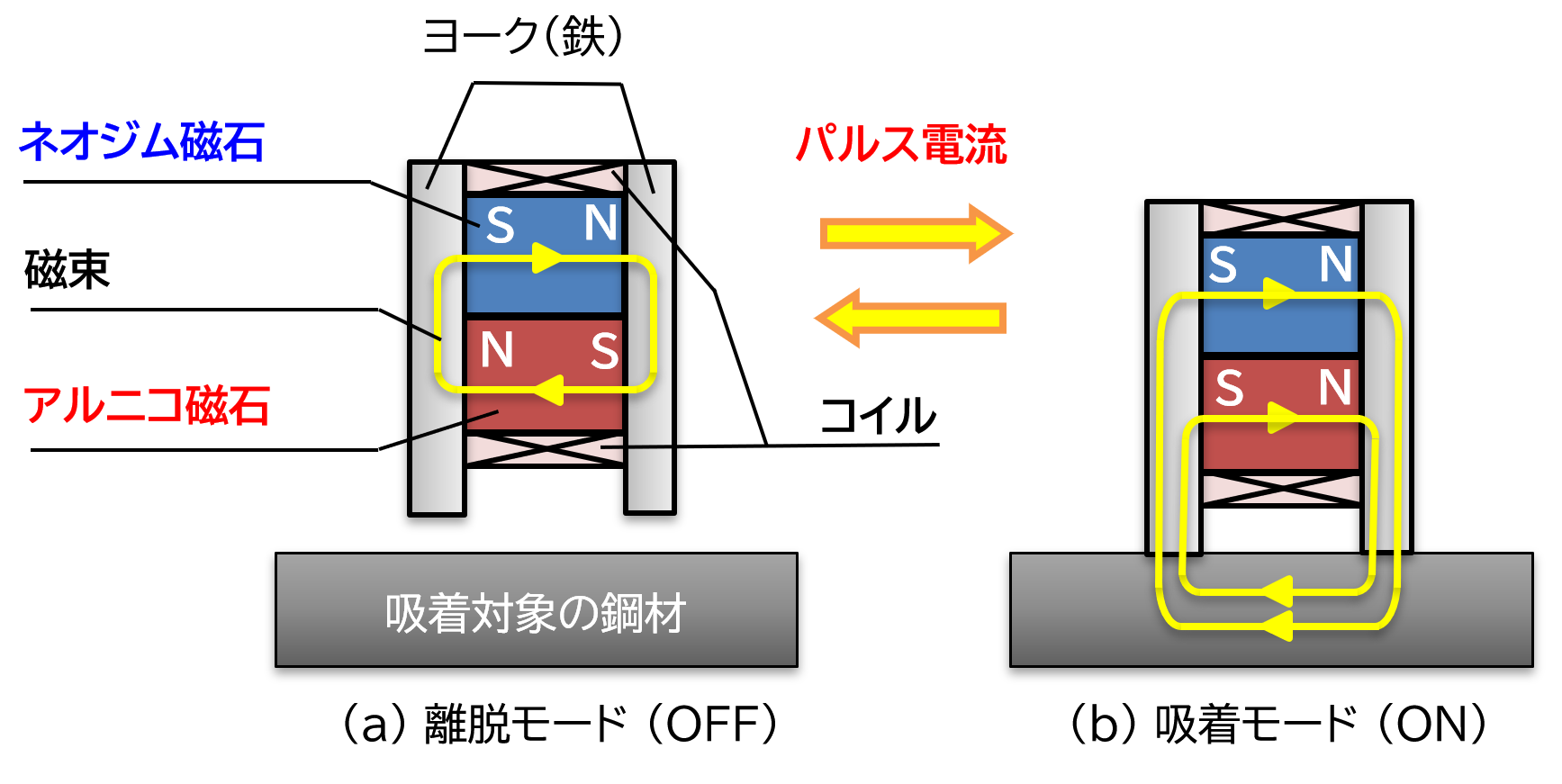
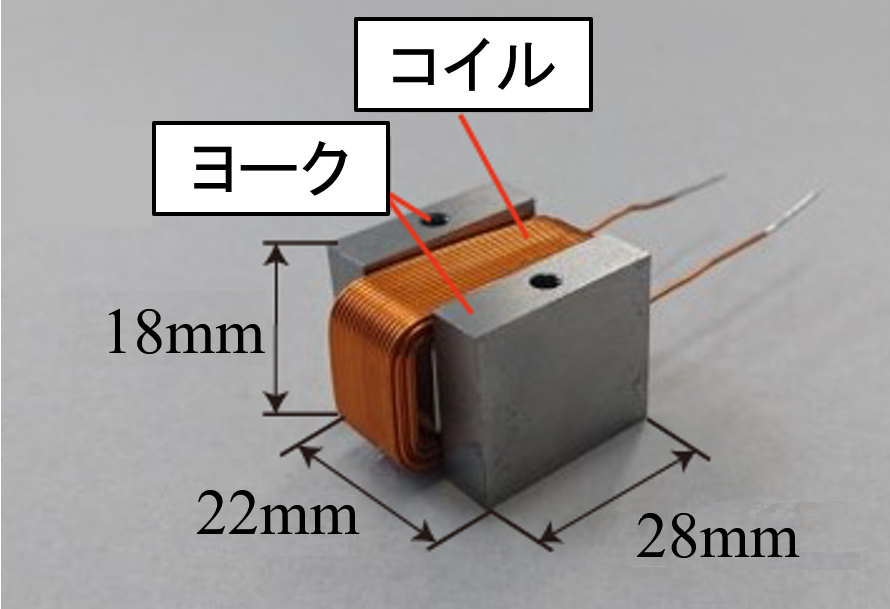
そこで、永久磁石と電磁石を組み合わせたような構造の「永電磁石(EPM)」という磁気吸着機構(図2)を使用しています。EPMはネオジム磁石とアルニコ磁石という2種類の永久磁石にコイルが巻いてある構造になっています。このコイルに瞬間的に電流を流すと、アルニコ磁石の極性だけが反転し、鋼材に吸着するモードと吸着しないモードを切り替えることができます。また、吸着中は永久磁石の磁力で鋼材にくっついているため、電力を消費せず、長時間の点検作業や接触を伴う点検作業も可能です。さらに、ドローンのバッテリが空になっても機体が落下しません。
そこで、永久磁石と電磁石を組み合わせたような構造の「永電磁石(EPM)」という磁気吸着機構(図2)を使用しています。EPMはネオジム磁石とアルニコ磁石という2種類の永久磁石にコイルが巻いてある構造になっています。このコイルに瞬間的に電流を流すと、アルニコ磁石の極性だけが反転し、鋼材に吸着するモードと吸着しないモードを切り替えることができます。また、吸着中は永久磁石の磁力で鋼材にくっついているため、電力を消費せず、長時間の点検作業や接触を伴う点検作業も可能です。さらに、ドローンのバッテリが空になっても機体が落下しません。
この他にも、GPSが使用できない環境でドローンを自律飛行させるためのナビゲーション技術などについても取り組んでおり、新たな技術で人の作業負荷を軽減し、社会的課題の解決に貢献できるよう研究を進めています。