





ロボティクス&デザイン工学部 ロボット工学科 先端モバイルロボティクス研究室

東 善之Higashi Yoshiyuki
准教授
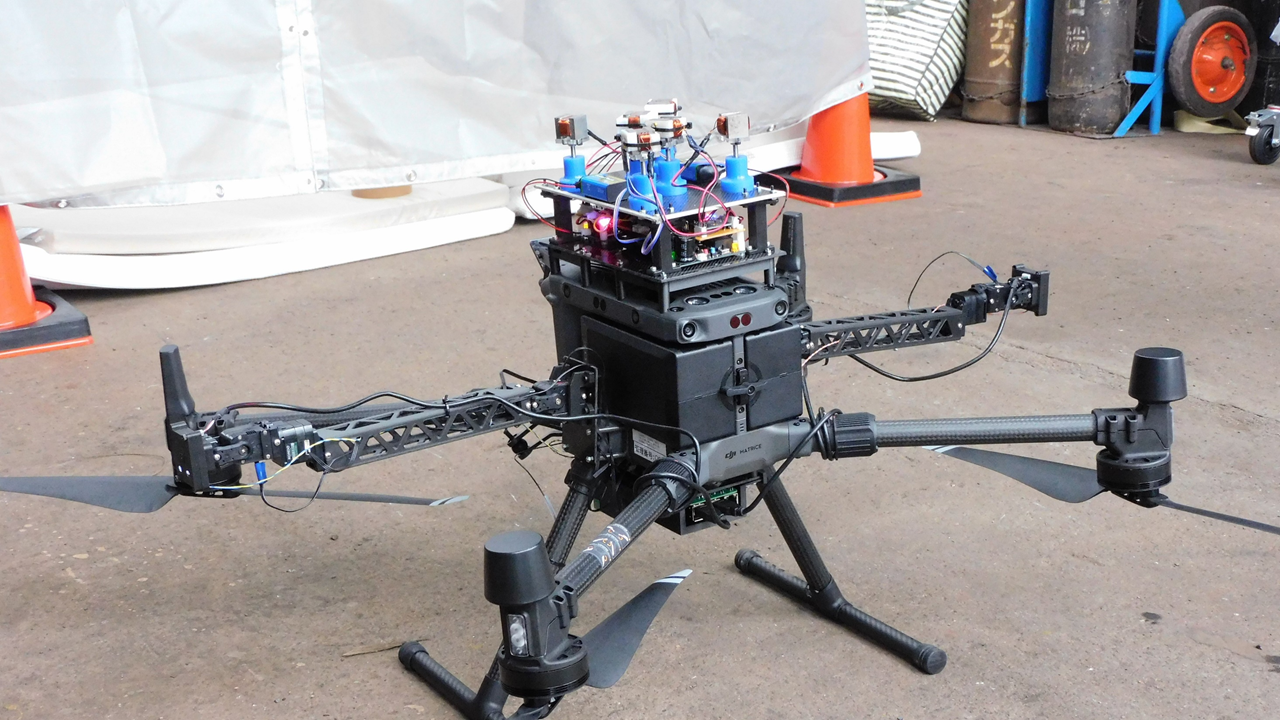
先端モバイルロボティクス研究室では、空を飛ぶドローンや地上を移動するビークルのように、自立したシステムとして自律的に移動可能な移動ロボットを使って、人の代替として活躍できるロボットのための技術について研究しています。特に、橋りょうなどの鋼製インフラ構造物を点検するためのドローン用の技術として自由に吸着・離脱の制御ができる磁気吸着機構や、GPSの電波が届かない環境における新たなナビゲーション技術、点検対象を認識するセンシング技術を中心に研究を進めています。
Theme 主な研究テーマ
- 橋りょう等の鋼製インフラ構造物に吸着可能な点検用ドローン
- 非GPS環境下における移動ロボットナビゲーション
- UWB通信を用いた測位空間の自律拡張システム
- 深度データを利用した構造物検出システム
Profile 教員プロフィール
東 善之Higashi Yoshiyuki准教授
専門分野
- ロボティクス
- メカトロニクス
