





ロボティクス&デザイン工学部 ロボット工学科 リアルワールド・ロボティクス研究室
大須賀 公一Osuka Koichi
教授
私たちが日々何気なく暮らしている日常社会をはじめ、都市、森林、海洋、空、宇宙、さらには土工現場や災害現場に至るまで、あらゆる場が「実世界(リアルワールド)」であり、そこには程度の差こそあれ、常に不確実性が内在しています。私たちは、そんな環境のことを「無限定環境」と呼び、その中で柔軟かつ適応的に行動可能な人工物を実現するための新たな設計アプローチとして、「開いた設計」という概念を提案しています。そして、実世界の中で自在に動き回れるロボット「実世界ロボット」の実現を目指しています。
Theme 主な研究テーマ
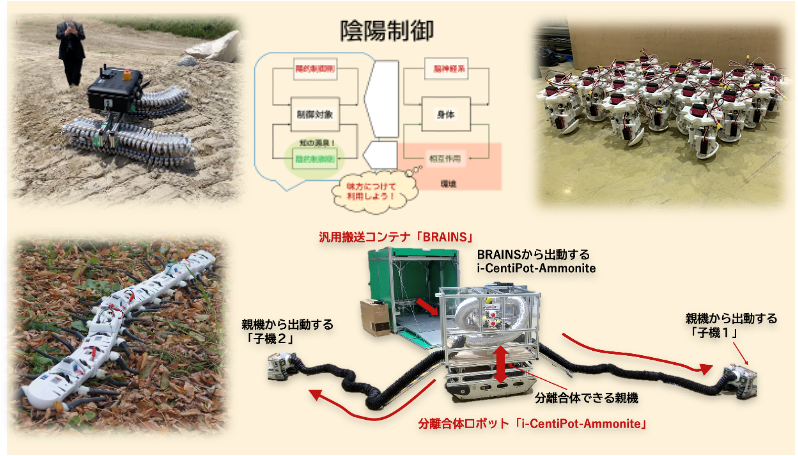
- リアルワールドロボティクス(実世界ロボット) 実世界で動きまわれるロボットを創るには?
- 陰陽制御学(陰的制御と陽的制御) 身体と場との相互作用を味方につけて知的に行動するための奥義!
Profile 教員プロフィール
大須賀 公一Osuka Koichi教授
専門分野
- 陰陽制御学
- 開いた設計論
- 災害対応ロボティクス
Message from the Faculty 教員メッセージ
当研究室では、災害現場や土工現場あるいは自然環境などの過酷な「実世界(無限定環境)」で自在に動き回れるロボットの開発を行います。具体的には、環境とは無闇に戦わず、柳に風のような気持ちで、環境と自分自身との相互作用を巧く活かした制御方法やメカニズムの設計を行います。制御理論や機構学に魅力を感じる人、ぜひ来てください。
Message to current students 在学生メッセージ
新しい人工物を産み出す最初のステップは、「こんなものを創りたいという志」を持って、その実現を目指して自由に妄想することです。そして徐々に概念設計、詳細設計へと進み、加工して組み立てて制御します。このように、モノづくりにはさまざまな学問が必要になります。基礎力を身につけてください。
Future この研究がかなえる未来
実世界(無限定環境)で自在に動き回れるロボットができると、結果的に災害現場や建設現場などで活躍するロボットや人工物を開発することができるようになり、さらに人類が直接到達できない深海や深宇宙などにも我々の好奇心の触手を伸ばすことができるようになります。