





工学部 電気電子システム工学科 ダイナミカルシステム研究室

杉本 靖博Yasuhiro Sugimoto
教授
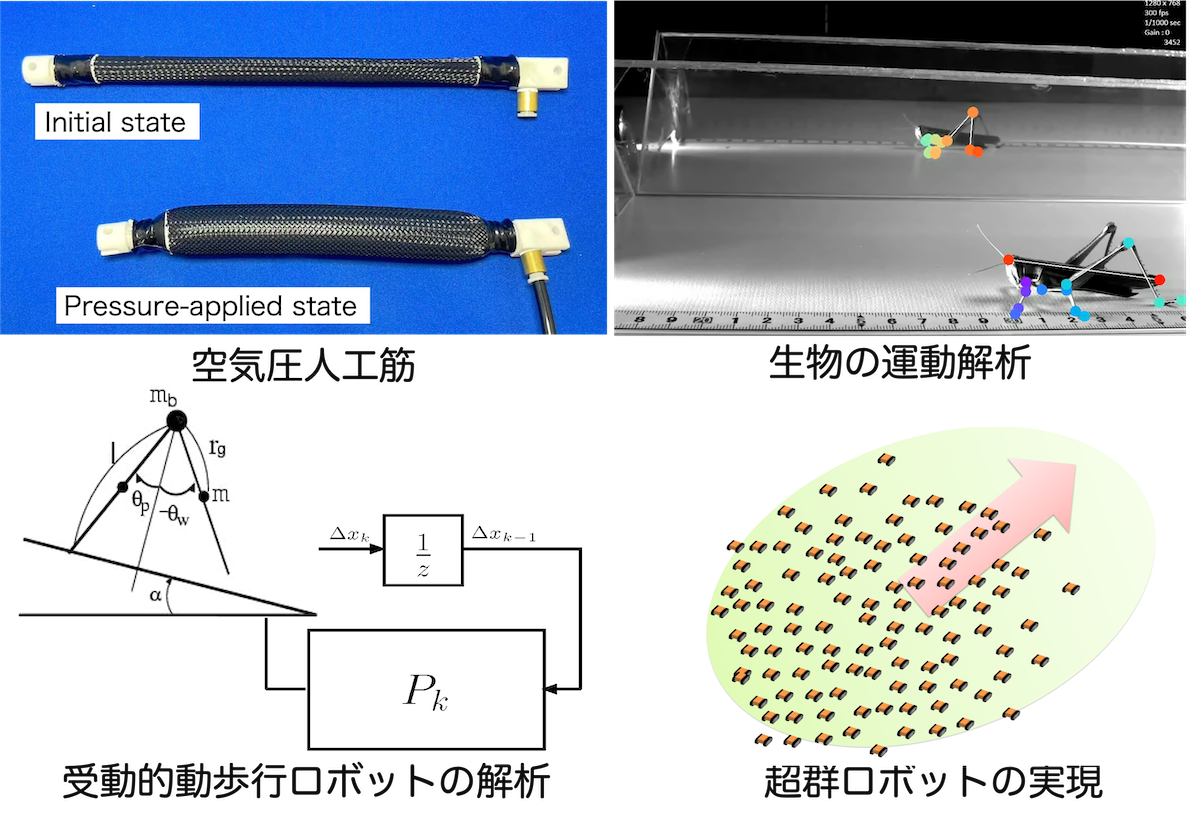
なぜ生物はこれほど巧みに動けるのでしょうか。その秘密は、脳や神経系による制御、筋肉、骨格がひとつのシステムとして連携し、さらに環境とも相互作用することで,その運動をうみだしているところにあります。本研究室では、制御工学やダイナミクス、非線形力学の視点から、ロボットや生物が生み出す適応的な運動の原理を探求します。空気圧人工筋による筋骨格ロボット、坂道をひとりでに歩く受動的動歩行ロボット、昆虫や爬虫類の歩行解析など、生物とロボットの境界で研究を展開しています。
Theme 主な研究テーマ
- 空気圧人工筋のモデリングと制御手法の開発
- 生物の適応的運動発現メカニズムに関する研究
- 脚ロボット、特に受動的動歩行ロボットの動力学解析と制御
- 無線通信を活用した群ロボットに関する研究
Profile 教員プロフィール
杉本 靖博Yasuhiro Sugimoto教授
専門分野
- ロボット工学,制御工学
研究室がめざすSDGs

Message from the Faculty 教員メッセージ
工学を学んでいると、どうしても「人工物をいかに設計するか」という視点で物事を見がちです。しかし自然界の生物は、私たちが設計したどんな機械よりも巧みに動いています。その秘密を解き明かすことが、より優れたロボットや制御システムの設計につながると私は考えています。ただし、生物をそのまま真似ればよいわけではありません。生物と人工物は材料も構造も目的も違います。大切なのは、見た目を真似ることではなく、「なぜそう動くのか」という原理を理解し、それを工学に活かすことです。本研究室では、力学や制御工学を使って、ロボットや生物の「動き」の仕組みを探ります。正解のはっきりしない問いに向き合い、試行錯誤する経験が、皆さんの大きな力になります。ぜひ一緒に「なぜ?」を追いかけましょう。