





9月27・28日、10月25・26日に大阪府中之島で開催された「中之島ロボットチャレンジ2025」に本学の情報科学部、ロボティクス&デザイン工学部で開発したロボットが出場しました。「中之島ロボットチャレンジ」は人々が往来する屋外で自律移動ロボットが問題無く行動できるかどうかを検証する大会で、中之島中央公会堂および中之島図書館を周回する約500mのコースを、道行く人々を回避し、段差のある路面を乗り越えてゴールを目指すという課題が与えられます。今年度はルールが追加され、横断歩道で正確な一時停止が義務付けられました。これは幅60cm程度の限られた空間にロボットが誤差なく停止することを求めるもので、参加チームが苦戦を強いられた大きな技術的難題となりました。
これに対し、本学では次の4台のロボットが出場しました。
「SmartBot v3(実世界情報学科)」
3次元の距離計測が可能なセンサを搭載し、そのセンサ情報を頼りに自律移動します。
「NeuroBot(情報知能学科)」
視覚神経系を模倣したビジョンセンサを搭載し、高い精度で物体認識を行うことが可能です。
「Sirius(ロボット工学科)」
車体や車輪が比較的大きいため路面の段差に強く、周回コースを最短距離で移動することが可能となっています。
「Kobuki改(ロボット工学科)」
小型の機体で可搬性に優れており、実験環境のデータ収集を迅速に行えることが特徴です。
本走行では、本学と共同で探究プロジェクトを実施している雲雀丘学園中学校・高等学校の教員・生徒が探究プロジェクトの一環で調査・見学にお越しいただき、多数の見学者が見守る中での走行となりました。この緊張感のある状況の中、実世界情報学科のSmartBot v3が、難関となった横断歩道での一時停止ルールにも柔軟に対応し、見事に全コースを完走しました。また、チャレンジには2回のチャンスがありますが、2回目は雨が降る中での走行にもかかわらず完走することができました。
これらの結果は、環境の変化やルール変更にも即座に対応し、ロボットの制御を最適化した学生たちの高い技術力と応用力が証明されたものです。
中之島ロボットチャレンジではコースを5周走行する周回チャレンジやアームによるゴミ拾い等、さまざまなチャレンジが用意されています。次回はそれらの種目も完遂できるよう開発を続けたいと思います。
なお、今回完走したロボットに関する技術やその応用ノウハウは、大学発ベンチャー企業「大阪インテリジェントロボティクス株式会社」が主催する各種技術セミナーにて詳細をご説明し、皆様へご提供いたします。ご興味がございましたら、お問い合わせフォームからご連絡ください。
枚方キャンパス 情報科学部 指導教員
・実世界情報学科:西口敏司 教授、荒木英夫 教授、宮脇健三郎 准教授
・情報知能学科:奥野弘嗣 准教授
梅田キャンパス ロボティクス&デザイン工学部 指導教員
・ロボット工学科:井上雄紀 教授、廣井富 教授
これに対し、本学では次の4台のロボットが出場しました。
「SmartBot v3(実世界情報学科)」
3次元の距離計測が可能なセンサを搭載し、そのセンサ情報を頼りに自律移動します。
「NeuroBot(情報知能学科)」
視覚神経系を模倣したビジョンセンサを搭載し、高い精度で物体認識を行うことが可能です。
「Sirius(ロボット工学科)」
車体や車輪が比較的大きいため路面の段差に強く、周回コースを最短距離で移動することが可能となっています。
「Kobuki改(ロボット工学科)」
小型の機体で可搬性に優れており、実験環境のデータ収集を迅速に行えることが特徴です。
本走行では、本学と共同で探究プロジェクトを実施している雲雀丘学園中学校・高等学校の教員・生徒が探究プロジェクトの一環で調査・見学にお越しいただき、多数の見学者が見守る中での走行となりました。この緊張感のある状況の中、実世界情報学科のSmartBot v3が、難関となった横断歩道での一時停止ルールにも柔軟に対応し、見事に全コースを完走しました。また、チャレンジには2回のチャンスがありますが、2回目は雨が降る中での走行にもかかわらず完走することができました。
これらの結果は、環境の変化やルール変更にも即座に対応し、ロボットの制御を最適化した学生たちの高い技術力と応用力が証明されたものです。
中之島ロボットチャレンジではコースを5周走行する周回チャレンジやアームによるゴミ拾い等、さまざまなチャレンジが用意されています。次回はそれらの種目も完遂できるよう開発を続けたいと思います。
なお、今回完走したロボットに関する技術やその応用ノウハウは、大学発ベンチャー企業「大阪インテリジェントロボティクス株式会社」が主催する各種技術セミナーにて詳細をご説明し、皆様へご提供いたします。ご興味がございましたら、お問い合わせフォームからご連絡ください。
枚方キャンパス 情報科学部 指導教員
・実世界情報学科:西口敏司 教授、荒木英夫 教授、宮脇健三郎 准教授
・情報知能学科:奥野弘嗣 准教授
梅田キャンパス ロボティクス&デザイン工学部 指導教員
・ロボット工学科:井上雄紀 教授、廣井富 教授
-

コースを完走し、ゴールを通過した情報科学部のSmartBot v3 -
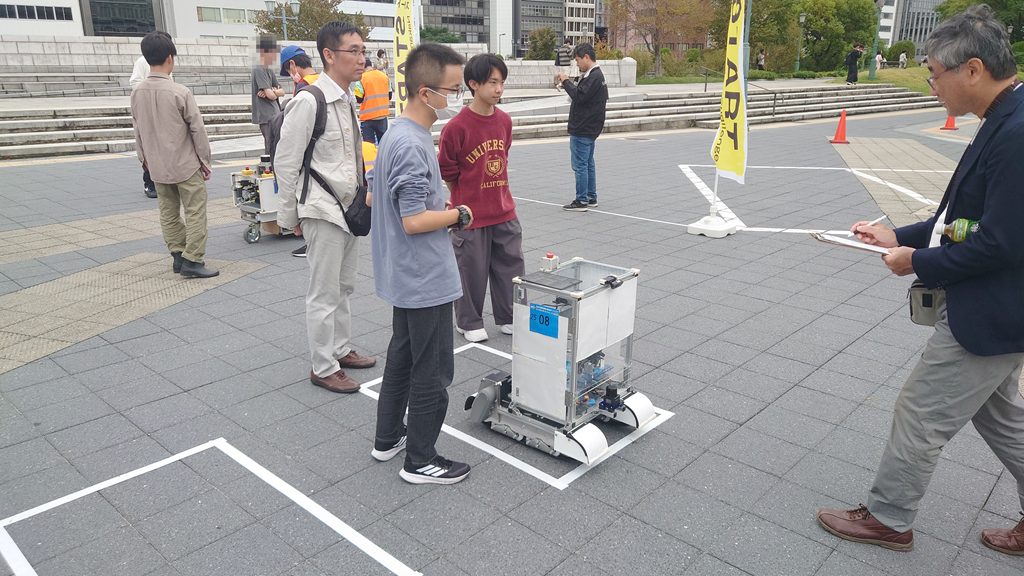
出走前に車両検査を受けるNeuroBot
-

ロボティクス&デザイン工学部のSirius -

開発チームメンバー -

雲雀丘学園中学校・高等学校の教員・生徒の皆様と本学メンバー