


トピックスTOPICS
「レスキューロボットコンテスト」に出場し、UP-RPが「レスキュー工学大賞」を受賞しました
2023.08.18
-
 大工大エンジュニア(黒)と UP-RP(ピンク)のメンバーら
大工大エンジュニア(黒)と UP-RP(ピンク)のメンバーら
-
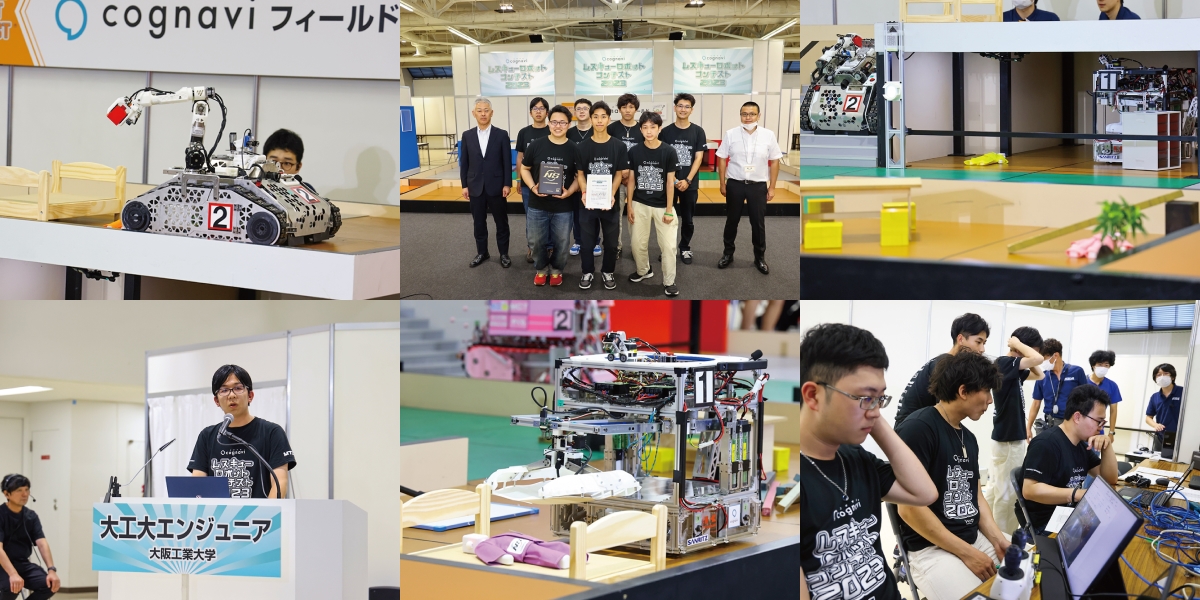 大工大エンジュニア
大工大エンジュニア
-
 UP-RP
UP-RP
8月11日、12日に神戸サンボーホール(神戸市中央区)で開催された「レスキューロボットコンテスト2023」に本学ロボットプロジェクトチーム「大工大エンジュニア」と梅田ロボットプログラミング部「UP-RP(ウーパールーパー)」が出場。大工大エンジュニアは「日本消防検定協会理事長賞」を受賞し、UP-RPは「ベストロボット賞」「日本ロボット学会特別賞」「消防庁長官賞」「計測自動制御学会特別賞」と最も権威ある賞の「レスキュー工学大賞」を受賞しました。
本大会は阪神・淡路大震災を契機に、レスキューシステムを拡充し災害に強い世の中を作るという大きな目標に向けて、技術の継承と次世代人材育成のための一つの手段として開催され、創造性を育む場や機会を提供しています。競技設定として、地震で被災した建物を模擬した4分の1スケールの実験フィールドでの救命救助活動を想定しています。ロボットを操縦するオペレータは実験フィールドを直接目視できない場所で主にロボットに搭載されたカメラの映像やさまざまなセンサーを頼りにロボットを遠隔操縦し、時間内に要救助者を模擬した3体のレスキューダミー(愛称:ダミヤン)を救出します。競技結果だけでなく、レスキューに対する考え方や競技内容も重要な評価基準となっています。
各出場チームは、指定されたスタートゲートからロボットをフィールドに投入。制限時間内に①作業ミッション、②調査報告ミッション、③救出ミッションの3つのタスクをこなします。また、競技ミッション以外にも事前に行われた書類審査や、プレゼンテーション、審査員評価などが複合的に評価され、順位が決定します。
大工大エンジュニアは、「迅速な救助」をコンセプトに、今年は出場ロボットを新しく作り直し、2機でコンテストに臨みました。両機に搭載している救助用ハンド「抱っこハンド」はダミヤンを優しく抱きかかえるようにして搬送できる点が特長です。1号機は駆動部にメカナムホイールを4輪採用しており、機体を回転させることなく前後左右に移動することができ、360度回転するカメラが全方位視認します。駆動部にクローラーを搭載した2号機は、高いトルクで階段をスイスイ上っていくことができます。また、1号機の「抱っこハンド」とは違いクッション性に優れた部品を多く使用することで、ダミヤンに衝撃を与えず優しく搬送できるように設計されてています。
大会初日の1stステージでは、1号機の足回りと2号機のアームが競技中のトラブルにより動かなくなってしまい思いどおりの競技ができませんでしたが、1stステージ後、すぐに修復作業を行い、ファイナルステージではすべてのダミヤンに支援物資を届けることができました。途中、1号機との通信が不良になり、うまく機体を操作できないトラブルが発生しましたが、チームメンバー同士で声を掛け合い、うまくリカバリーしました。同チームは、ロボットが通った後にケミカルライトを配置して、逃げ道までのルートを示す工夫を行い、その点が評価され「日本消防検定協会理事長賞」を受賞しました。
リーダーの横山浩大さん(機械工学科3年)は「今年は2機とも新作だったので、十分な練習時間を取れなかったことが課題でした。来年は今年の機体を改良して、練習を積み重ねていきたいです」と次年度への闘志を燃やしていました。
梅田キャンパスに拠点を置く梅田ロボットプログラミング部の「UP-RP」も、今年は新規製作のロボットでコンテストに臨みました。人命救助を意識して、救急車をイメージしたカラーリングやデザインを採用。1号機「ロミオ」はオムニホイールによる前後左右への機動力がポイントで、前方に装着された大きなカバーでガレキを撤去し、ダミヤンを安全に優しく搬送することができます。アームはどの方向からでもダミヤンを救助できるよう先端に360度回転リンクをもち、高さを調節できるベルトコンベアを組み合わせることでダミヤンのいる場所とコンベアの段差を無くしやさしく救助することができました。前輪のオムニホイールが大きな機体でも小回りを実現、床からの高さが変えられるの前面のカバーで大小さまざまなサイズのガレキの撤去ができます。また、2号機「ジュリエット」は、蜘蛛をイメージした6本多脚が特長で、階段を歩くような動作で登ったり、多脚を伸ばすことで本体を高く上げ、ダミヤンの真上から確実に救助することができます。また、2号機は、市販の汎用部品で組み立てているため、カスタム性が高い点も特長です。
1stステージでは、2号機は予定どおりにタスクをこなし、無事に2階の救助エリアまでたどり着きましたが、1号機の部品が外れるトラブルがあり、期待した結果にはなりませんでした。原因などを追究し、修理を行い、ファイナルステージに挑みました。ファイナルステージでは、予定どおりに両機が動き、チームとして初めてダミヤンを救出することができました。
健闘の結果、同チームは2回目の出場で「ベストロボット賞」「日本ロボット学会特別賞」「消防庁長官賞」「計測自動制御学会特別賞」を受賞。6本多脚の挑戦的なロボットが無事に2階に辿り着けた点と、狭い空間の中でもがれき撤去と救助のアームを巧みに操作し、見事にダミアンを救出できた点が評価され、「レスキュー工学大賞」を受賞することができました。この賞はレスキュー工学の観点から、コンセプト・技術力・組織力を総合的に判断して最も優れたチームに対して贈られる本コンテストで最も権威ある賞で、同チームは初受賞となります。昨年に引き続きリーダー2年目となる本多彩音さん(ロボット工学科3年)は「ずっと、夜遅くまでロボット製作や開発を行ってきたので、このような栄えある賞を受賞できてうれしいです。チームメンバーの努力が報われました」と笑顔を見せました。
表彰結果速報 (競技会本選/レスコン2023)
