


トピックスTOPICS
「第16回レスキューロボットコンテスト」で特別賞を受賞
2016.09.05
-
 特別賞を受賞し、笑顔がこぼれるメンバーたち
特別賞を受賞し、笑顔がこぼれるメンバーたち
-
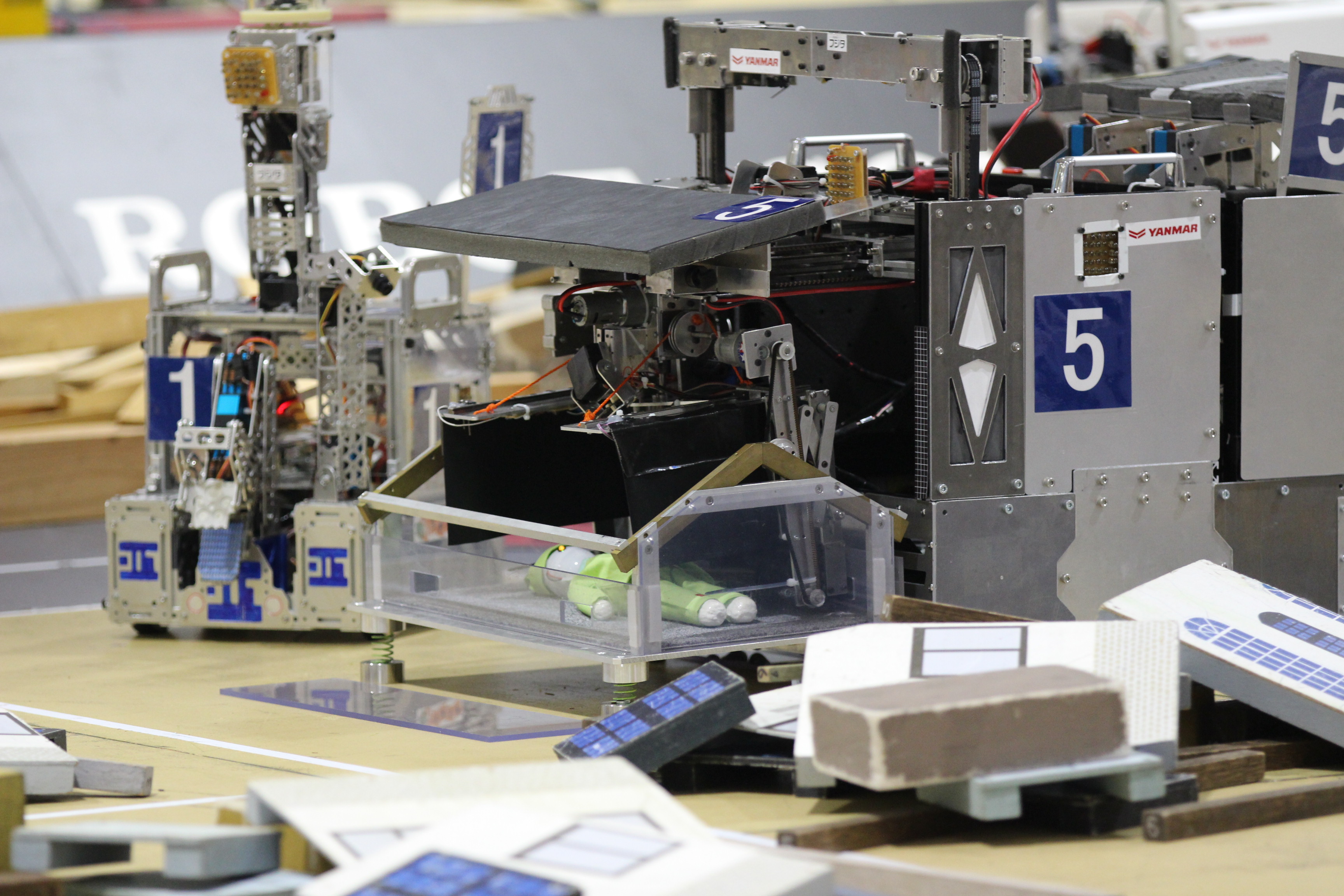 障害物のがれきを取り除くなどロボットを巧みに操作し、ダミヤンを救出
障害物のがれきを取り除くなどロボットを巧みに操作し、ダミヤンを救出
-
 競技終了後、インタビューを受けるリーダーの山本碧土さん(電気電子システム工学科3年)
競技終了後、インタビューを受けるリーダーの山本碧土さん(電気電子システム工学科3年)
8月6日、7日に神戸サンボーホール(神戸市中央区)で開催されたinrevium杯「第16回レスキューロボットコンテスト 競技会本選」で、本学ロボットプロジェクトチーム「大工大エンジュニア」が特別賞「ベストテレオペレーション賞(サンリツオートメイション賞)」を受賞しました。
競技は、チームやロボットの特長、救出方法を説明する2分間のプレゼンテーションを行った後、ヘリテレ(俯瞰カメラ)から届く映像を解析する作戦会議を経て、制限時間12分間(予選のファーストミッションは10分間)の中で要救助者に見立てた3体のダミヤン(レスキューダミー人形)の救出を行います。ロボットの操縦者は、ダミヤンが設置されているフィールドを直接見ずに、ロボットに搭載したカメラやセンサーから得られる情報だけを頼りに、コントロールルームから遠隔操作します。ロボットの性能だけでなく、高い遠隔操縦技術、迅速な状況判断が総合的に評価されます。
本選は予選に比べ、難易度が高く設定されており、ロボットの進行を妨げる障害物も増え、予選にはなかった傾斜道路と高台での救助活動が追加されました。また、実際の災害現場では予測不可能な事案が発生することから、サプライズタスクとしてコンテスト当日、ヘリテレによる高台部分の映像入手が不可能という設定が追加され、チームの対応力や応用力、柔軟な思考が求められました。
本学チームは、「いつでも どこでも だれでも ベストパフォーマンス」をチームコンセプトに今大会出場チーム中、最多となる7台のロボットを作製し、大会に挑みました。競技では、探索・がれき撤去機、救助機、自律移動機のロボットを巧みに操作し、2体のダミヤンを救出することに成功。サプライズタスクも超音波センサーと全方位カメラを用いることで、いち早く被災現場の災害状況を把握し、対応することができました。他チームに先駆け導入した、ダミヤンとの距離を超音波で測ることができる操縦者アシストシステムが高く評価され、今回の受賞につながりました。
このコンテストは、大規模都市災害における救命救助活動をテーマにしたもので、防災や救命救助に関する知識を高め、次世代の研究者・技術者育成を目的に開催されています。彼らの磨いてきた技術や自由な発想が災害現場で活用される未来も遠くないのかもしれません。
