


トピックスTOPICS
「レスキューロボットコンテスト」で大会史上初、三度目の「レスキュー工学大賞」を受賞
2019.08.27
-
 ロボットプロジェクトチームのメンバーら
ロボットプロジェクトチームのメンバーら
-
 レスキュー工学大賞受賞を喜ぶ
レスキュー工学大賞受賞を喜ぶ
-
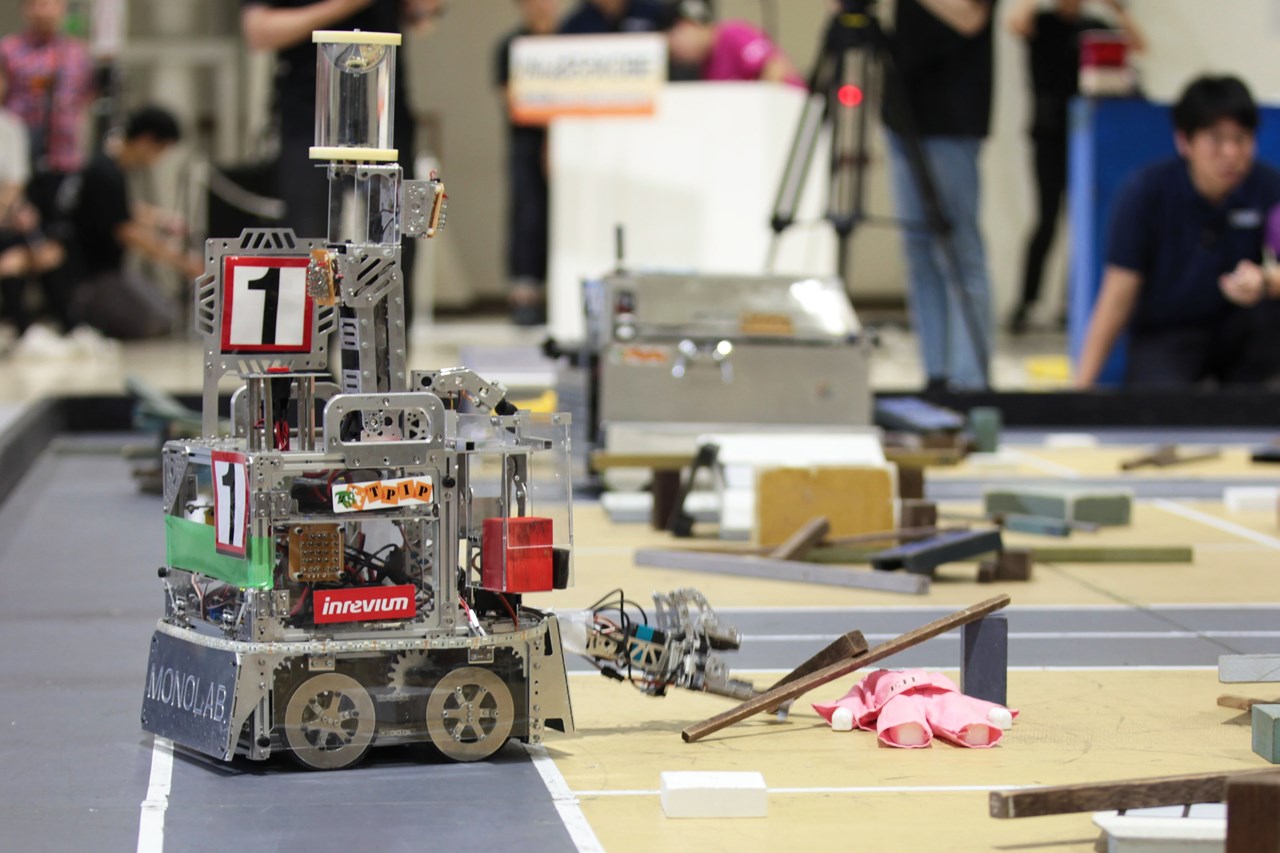 ダミヤンを救助するため、慎重かつ正確に瓦礫を撤去
ダミヤンを救助するため、慎重かつ正確に瓦礫を撤去
8月10日、11日に神戸サンボーホール(神戸市中央区)で開催された「inrevium杯 第19回レスキューロボットコンテスト」に本学ロボットプロジェクトチーム「大工大エンジュニア」が出場し、大会史上初三度目の「レスキュー工学大賞」を受賞。さらに、「ベストロボット賞(日本ロボット学会特別賞)」「inrevium杯」「日本消防検定協会理事長賞」「計測自動制御学会特別賞」の各賞を受賞しました。
本大会は阪神・淡路大震災を契機に、レスキューシステムを拡充し災害に強い世の中を作るという大きな目標に向けて、技術の継承と次世代人材育成のための一つの手段として開催され、創造性を育む場や機会を提供しています。競技設定として、大地震で倒壊した市街地を模擬した6分の1スケールの実験フィールドでの救命救助活動を想定しています。ロボットを操縦するオペレータは実験フィールドを直接目視できない場所で主にロボットに搭載されたカメラの映像を頼りにロボットを遠隔操縦し、時間内に要救助者を模擬した3体のレスキューダミー(愛称:ダミヤン)を救出します。競技結果だけでなく、レスキューに対する考え方や競技内容も重要な評価基準となっています。
本学チームは、初日のファーストミッションで2体のダミヤンの容体判定識別因子(顔の色、音(周波数)、鳴動パターン、QRコード)を唯一完全に正解した上で、2体とも救出しました。結果、上位6チーム以内に入る成績を残し、セカンドミッションが免除となるファイナルミッションへのシード権を獲得しました。複雑な瓦礫配置で難易度が格段に上がったファイナルミッションでは、他チームが悪戦苦闘するなか、1号機に装備された全方位カメラで周囲360度をモニターし、瓦礫をすばやく撤去し、救助ルートを確保しました。さらに、新たに追加された高さ100ミリの障害物を乗り越えるために改良した無限軌道のクローラーでダミヤンの元まで速やかに到着。出場チーム随一のスピードと正確さで2体のダミヤンの救助に成功し、ファーストミッションに続いて2体の容体判定も完璧に行いました。
閉会式では、審査員から「さまざまな技術が詰め込まれたロボットがきちっと機能し、容態判定に注力したことが勝因だと思います。」とコメントを受け、大会史上初となる三度目のレスキュー工学大賞を受賞しました。
大会を終え、リーダーの平航河さん(ロボット工学科3年)は、「レスキュー工学大賞を受賞することを目標に1年間活動してきたので、本当に嬉しいです。3体救助搬送できなかったことが悔しい点なので、後輩たちには更に完璧な救助活動を実現してほしいです」と大会を振り返るとともに後輩に思いを託しました。
【指導教員】
電子情報システム工学科・奥宏史 准教授(代表)
機械工学科・牛田俊 教授
システムデザイン工学科・小林裕之 教授
電気電子システム工学科・田熊隆史 准教授
ものづくりセンター・近藤隆路 技師
